No.31 15分で動かせる! ロボットコントローラMRC01と小型ロボットOVRでセットアップをやってみた!
初心者も15分で動かせる!
MRC01+小型ロボットOVRでセットアップをやってみた!
自動化・省人化のためにロボットを導入したい。
でも、「ロボットの制御は専門家ではないから難しくて自分ではできない…」と、制御のハードルが高く導入をあきらめていませんか。
そんな方にピッタリなのがオリエンタルモーター製ロボットコントローラ MRC01。
ロボットの制御が苦手という方にも簡単に使えるように作られたコントローラです。
「とはいっても難しいんじゃないの?」
そういった声もあるかと思い、今回のお役立ち情報ではMRC01のセットアップをやってみました。
使用するロボットはオリムベクスタ製の4軸垂直多関節ロボットアームOVR4048K5-V。
MRC01にはこのロボットが登録されているので立ち上げも簡単。
初心者でも初期設定からプログラムまで15分でできます。
そのほか、今回のお役立ち情報では
ストップウォッチ不要 動かす前にタクトタイムがわかる「運転時間推定機能」
こんなにつながる MRC01で動かせるいろいろなオリムベクスタのロボット
なども一緒にご紹介します。
OVR4048K5-Vのほか、OVR5035K1-V、OVR4088K5-Vを使用した実機体験セミナーを開催しています(詳細はこちら>>>)
\ロボットアームの総合カタログはコチラ/ \グリッパやカメラを含むシステムの価格など/


MRC01+OVR4048K5-V セットアップレビュー
システム構成

※MRC01の詳しい情報はこちら>>>
※OVR4048K5-Vの詳しい情報はこちら>>>
実際にやってみた!
実際に動かしてみました。実際の操作は動画をご覧ください。
初心者でも15分で動かせます。
| ステップ | 再生時間 | レビュー動画 |
| 初期設定 | 4:20 | |
| 動作確認 | 2:07 | |
| 原点設定 | 3:06 | |
| プログラム | 4:32 |
動かす前にタクトタイムがわかる 「運転時間推定機能」をレビュー
「ロボット使ったら1時間でどのくらいの作れる?」
ロボット導入で省人化を目指すときに、どのくらいの生産性が上がるかというのは重要です。
実際にロボットを動かしてストップウォッチで測るのでもいいですが、そんなことをしなくてもわかる方法があります。
「運転時間推定機能」を使えば簡単に算出できます。
これを使用することで、
・ストップウォッチを使わなくてもトータルの運転時間が算出できる
・コマンドごとの運転時間もわかるため、どのコマンドが運転時間が長いかがわかる
といったことができます。
立ち上げ時の時間短縮にご活用ください。
さまざまなタイプのオリムベクスタのロボットの制御はこれ1台で網羅 【ロボットタイプ追加】
今回のセットアップではOVR4048K5-Vを使用しましたが、オリムベクスタにはまだまだたくさんのロボットがあります。
これらのロボットもMRC01で動かすことができるんです。
オリムベクスタのロボットとMRC01のロボットパターンについてご紹介します。
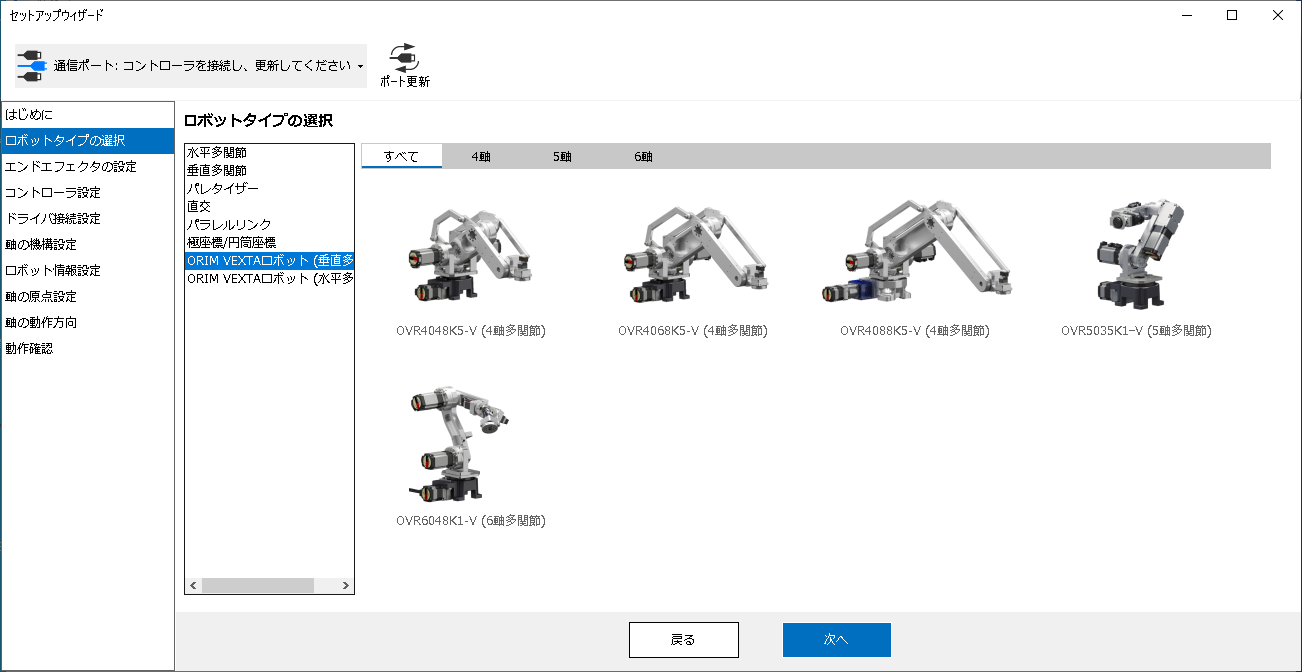
| ロボット | ロボットタイプ |
|
|
ロボットの写真をアイコンにしているため、選びやすくなっています。 |
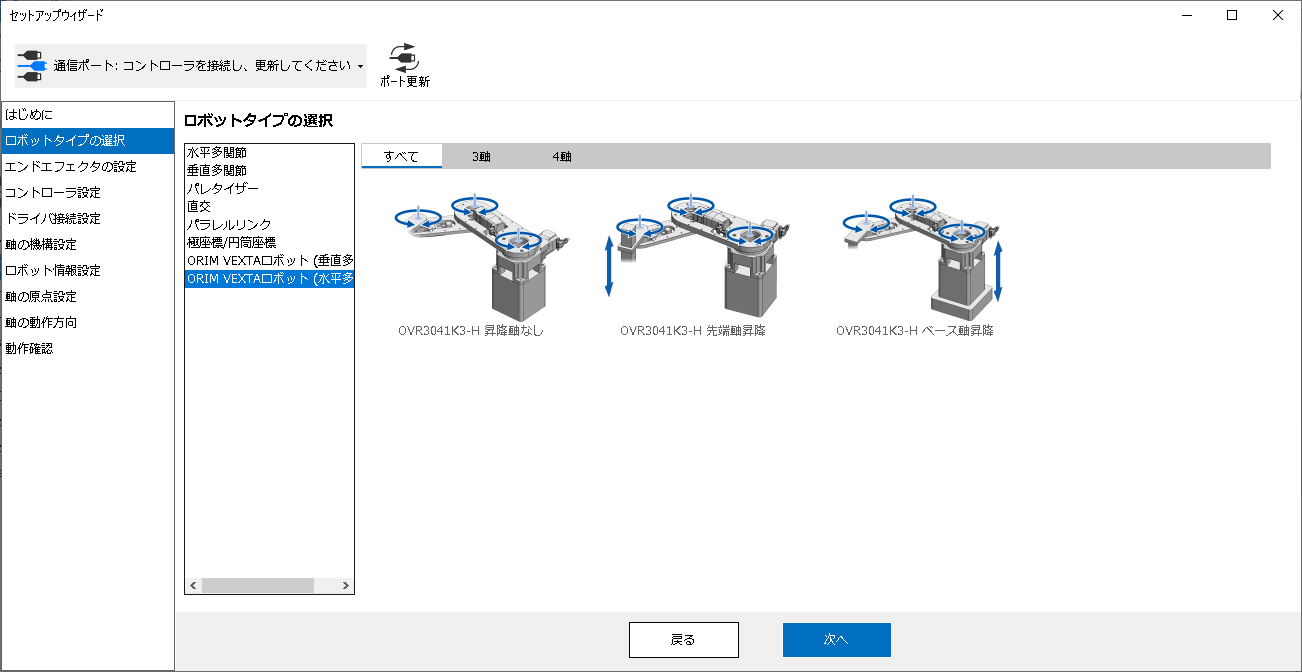
|
|
ロボットをそのまま使用したパターンの他、アームの先に上下機構を取り付けたパターンや、ロボット自体を上下スライダに搭載したパターンの3パターンが選べます。 |
|
|
FESTO製平面ガントリEXCMシリーズは、1本のベルトを2台のモーターで動かすことによりX-Yテーブルの動きを実現した特殊な構造の製品です。 Y軸用のケーブルベアがいらなかったり、アブソリュートエンコーダ搭載のAZシリーズ搭載により、原点やリミットセンサが不要のため、配線設計がすっきりできる製品です。 今回のバージョンアップで平面ガントリの設定ができるようになり、製品の向きや、Z軸の有無によって8パターン選べるようになっています。 特殊な構造で通常のコントローラで動かすのは難しいですが、それをMRC01に任せることで簡単に動かせます。 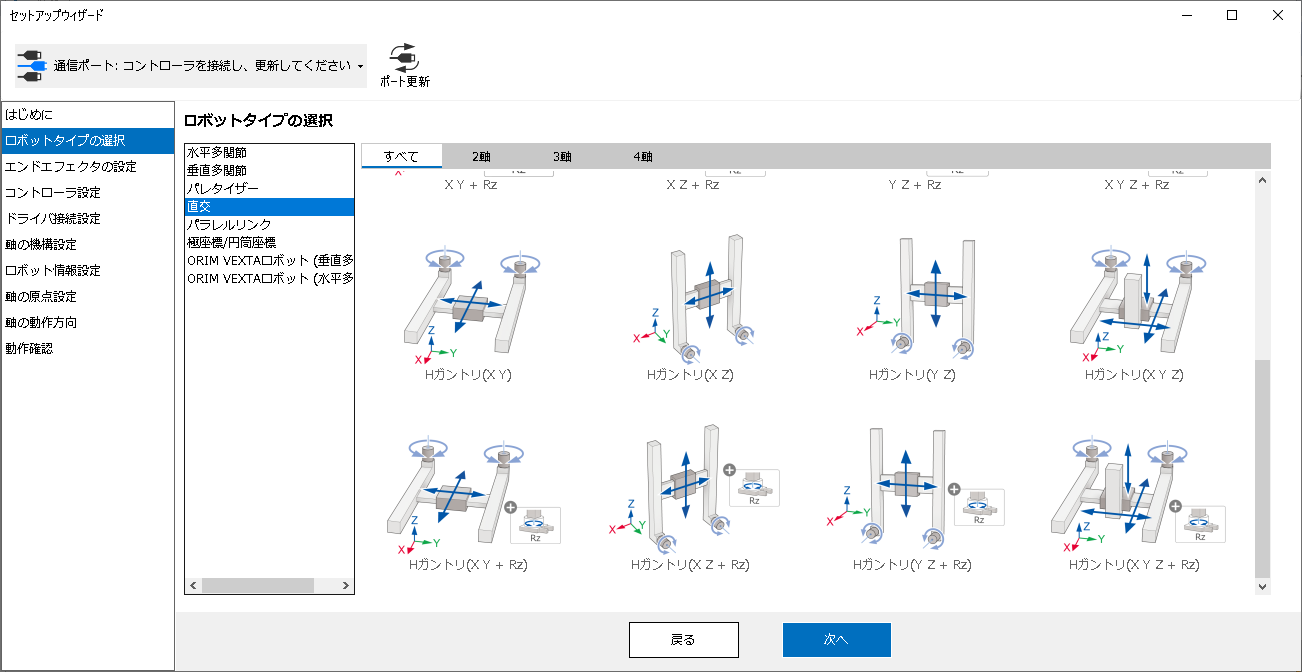 |
|
|
THK製円筒座標型モジュールMLSはワークの投入・搬出工程での自動化・省人化に貢献できるロボットです。 昇降、旋回、伸縮の3つのモジュールで構成されています。 それぞれのモジュールにはオリエンタルモーター製のAZシリーズが搭載されており、今回のバージョンアップでMRC01で制御できるようになりました。 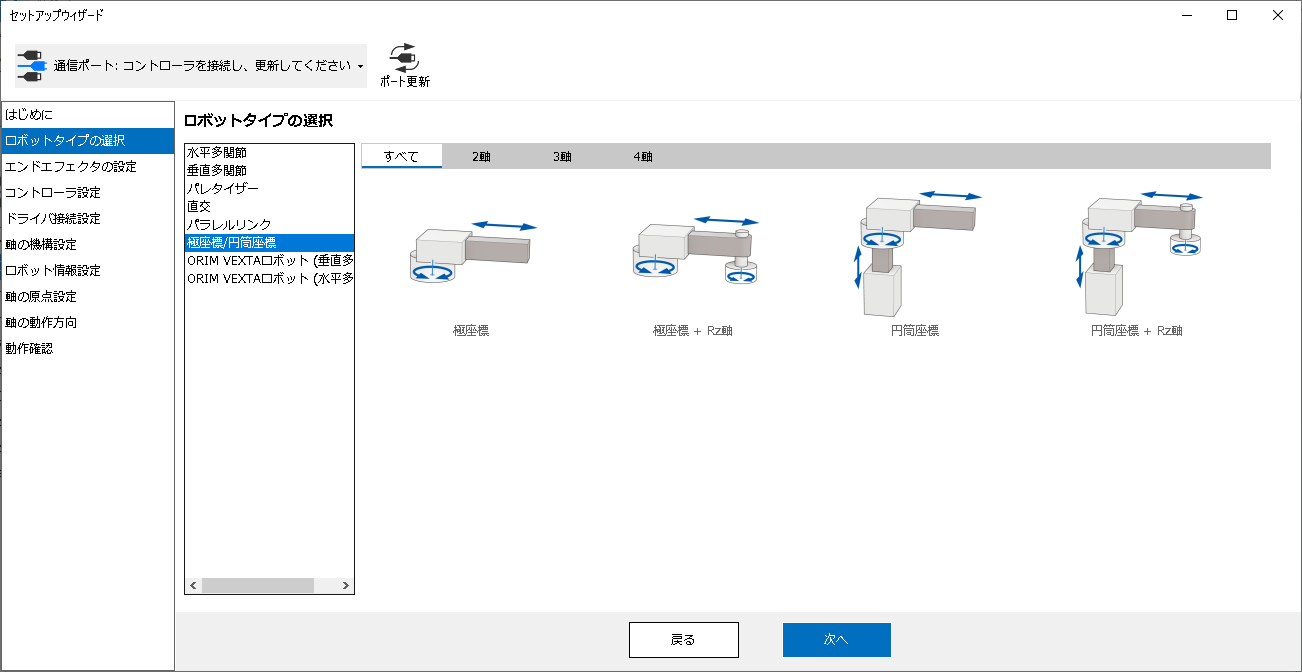 |
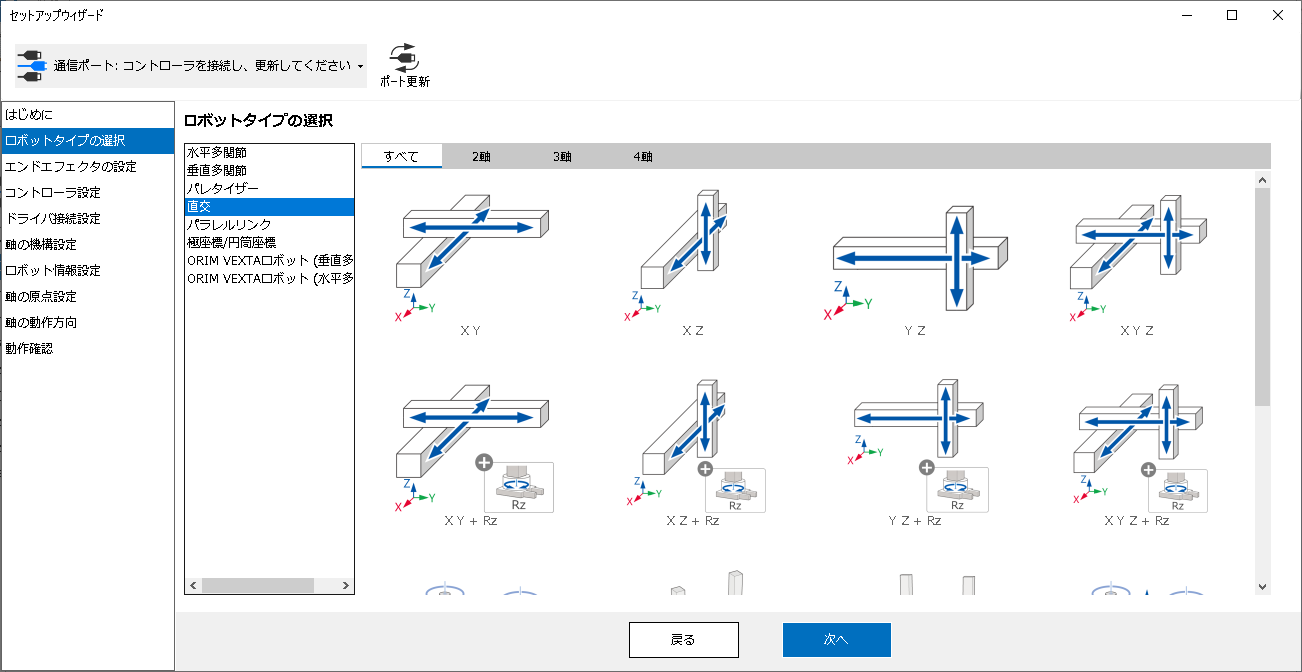
|
|
ロボットというと垂直多関節や水平多関節ロボットアームのようなアームがついたロボットをイメージしますが、従来からあるスライダを組み合わせてのXYZテーブルなどのパターンも選べます。 |