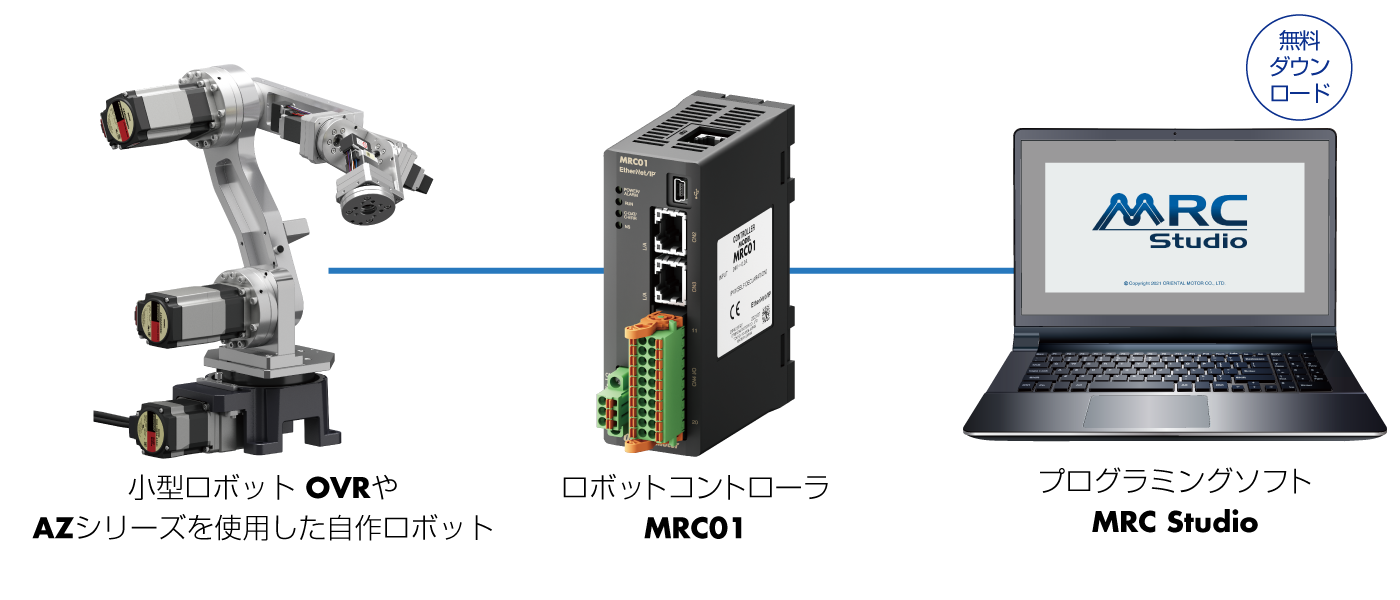
ロボットコントローラ MRC01

-
「初期設定」「動作プログラミング」「動作確認」の3ステップで
かんたんに導入・制御できるロボットコントローラです。
αSTEP(アルファステップ)AZシリーズを使用したロボットを制御できます。
●ロボットを簡単に導入制御
●プログラミングソフトで簡単セットアップ
●垂直/水平多関節、直交ロボットの制御可能

特徴
PLCを使ったシーケンス制御の経験がない機械設計の方にも、楽々動作
MRC01は、プログラミングソフト MRC Studioで設定した動作プログラムをPCだけで、かんたんにティーチング、動作確認することができます。
既存のシステムに、ロボットをかんたん導入
MRC01と上位システムとの連携は、EtherNet/IP™でダイレクト制御。
既存の設備の制御システムを大きく変更せずに、小型ロボット OVRや自作ロボットをかんたんに追加導入できます。
※ EtherNet/IP™はODVAの商標です。
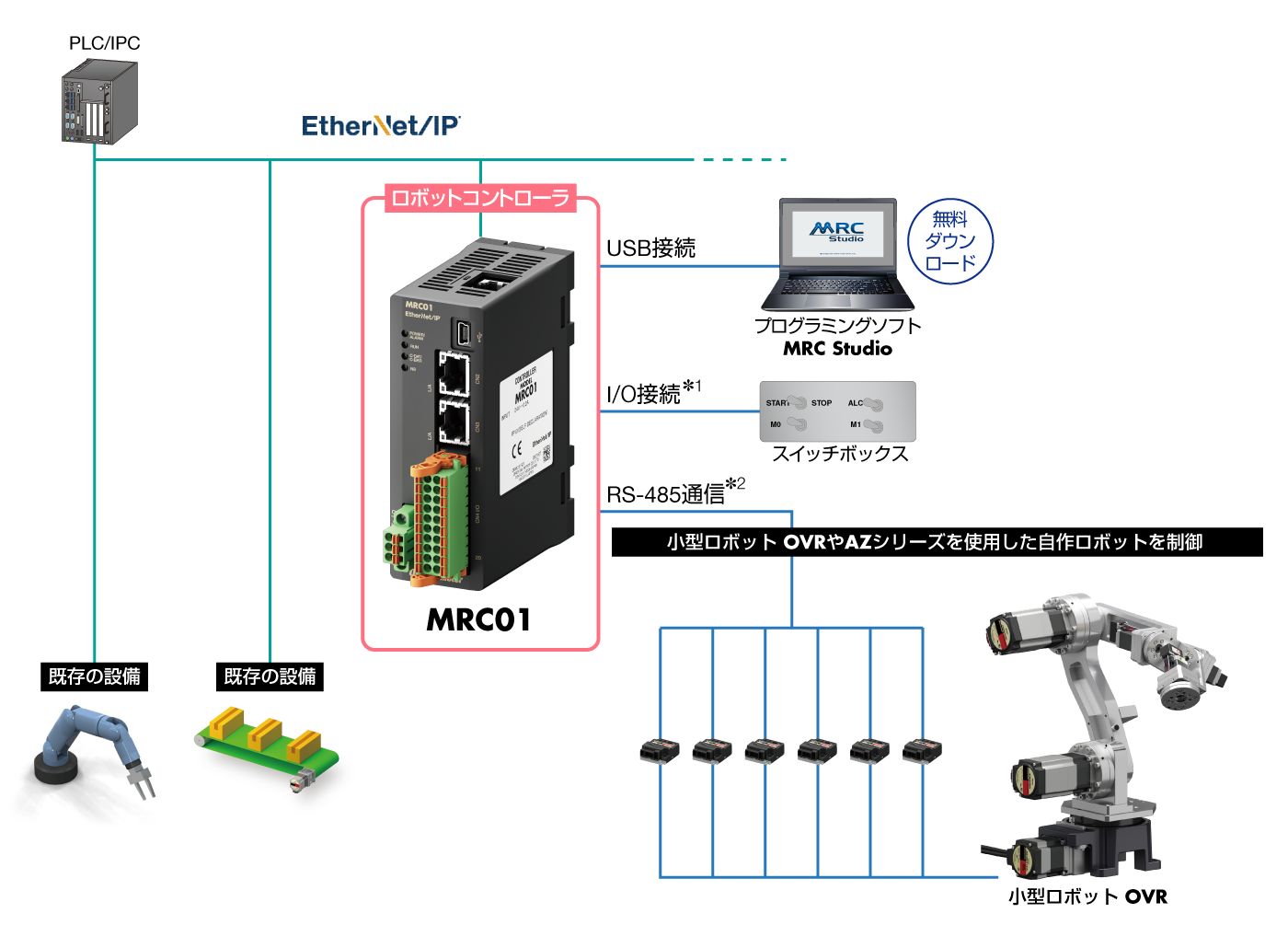
※1 MRC01は、I/O接続(上位機器なし)でも動かすことができます。
※2 MRC01とAZシリーズのドライバ間は、RS-485通信で制御しています。ロボットコントローラ MRC01とプログラミングソフト MRC Studioでかんたんセットアップ
自作ロボットの初期設定から動作プログラムまで、かんたんに設定できる「プログラミングソフト MRC Studio」をご用意しています。
また、MRC01との通信なしでティーチングが可能な「MRC Studio Simulator」もご用意しています。
MRC Studio Simulator で作成したプログラムは、実際のロボット導入時にそのままご使用いただけます。
ソフトはどちらも無料でダウンロードいただけます。
プログラミングソフト MRC Studio をダウンロードStep1. ガイダンスに従って、迷わず初期設定。
ロボットタイプの選択や機構情報の入力など、一連の初期設定をウィザード形式でおこなえます。イラストを見ながらガイダンスの指示に従って設定することで、初めてでも短時間でロボットの初期設定ができます。小型ロボットOVRは機構情報があらかじめ入力されているため、より簡単に初期設定をおこなえます。
手順に従って設定
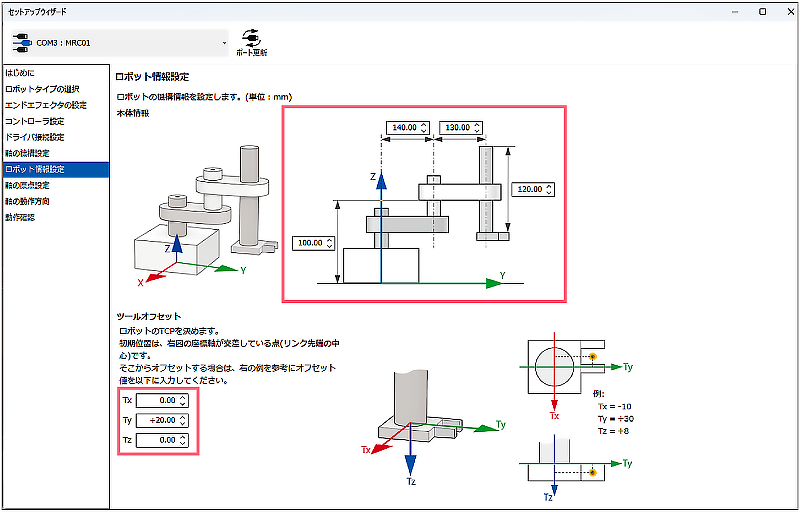
ウィザードメニューに従ってロボットの初期設定をすすめます。ロボットのイラストを見ながら、アームの長さなどの寸法を入力
寸法は、イラスト内の入力欄に直接入力します。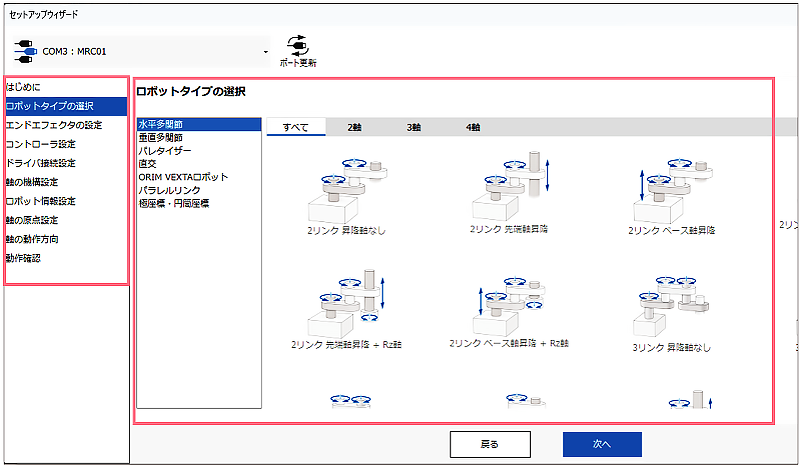
ロボットタイプを選択
(代表例)水平多関節(スカラ) 垂直多関節 パレタイザー パラレルリンク 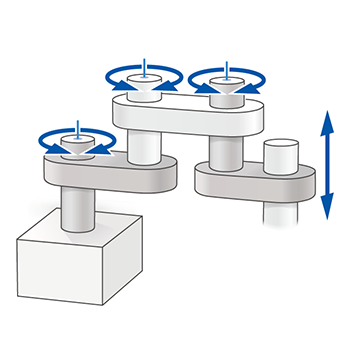
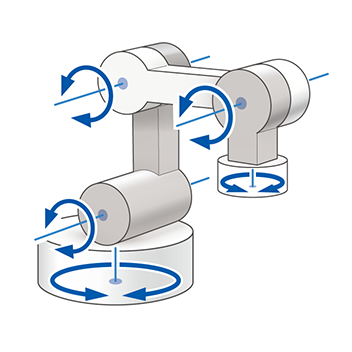
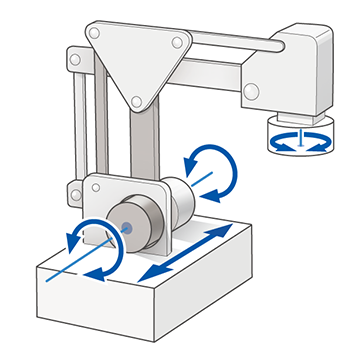
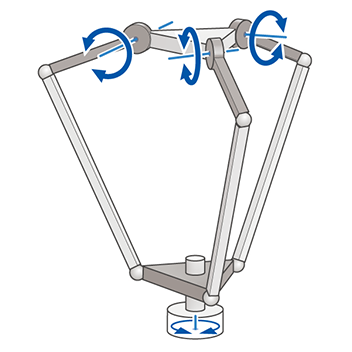
3リンク 先端軸昇降 3リンク ベース軸旋回+Rz軸 2リンク機構 ベース軸直動+Rz軸 パラレルリンク+Rz軸 直交 小型ロボットOVR
垂直多関節小型ロボットOVR
水平多関節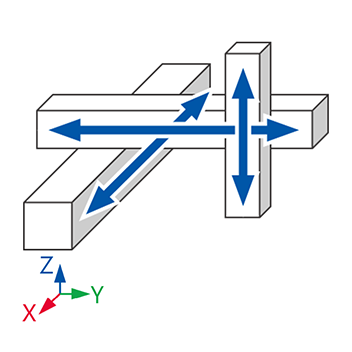


XYZ 平面ガントリ(XY) OVR6048K1-V(6軸) OVR3041K3-H(3軸) Step2. ラダーの知識は不要。項目選択で、動作のプログラミング。
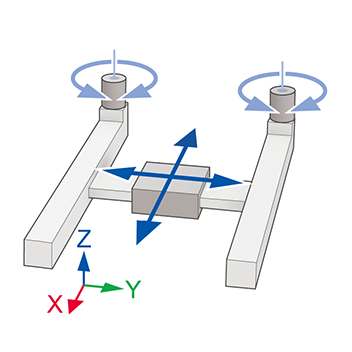
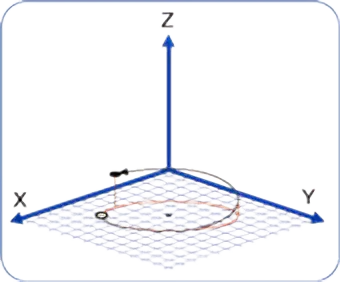
プログラムの作成は、コマンドを選択していくかんたんな方式です。ラダーなどの専門知識がなくても直感的にプログラムを作成できます。P to P運転、直線補間運転、円弧補間運転、アーチモーションなどに対応しています。さらに、上位制御機器からEtherNet/IP経由で、直接運転データを実行することもできます。
必要なコマンドをドラッグ&ドロップ 目標位置や速度を設定 「コマンド」欄から必要な動作を選んで、「シーケンス」欄にドラッグ&ドロップすると、「コマンド設定」欄が表示されます。 目標位置の座標・移動量の指定、速度をコマンド設定欄に入力します。 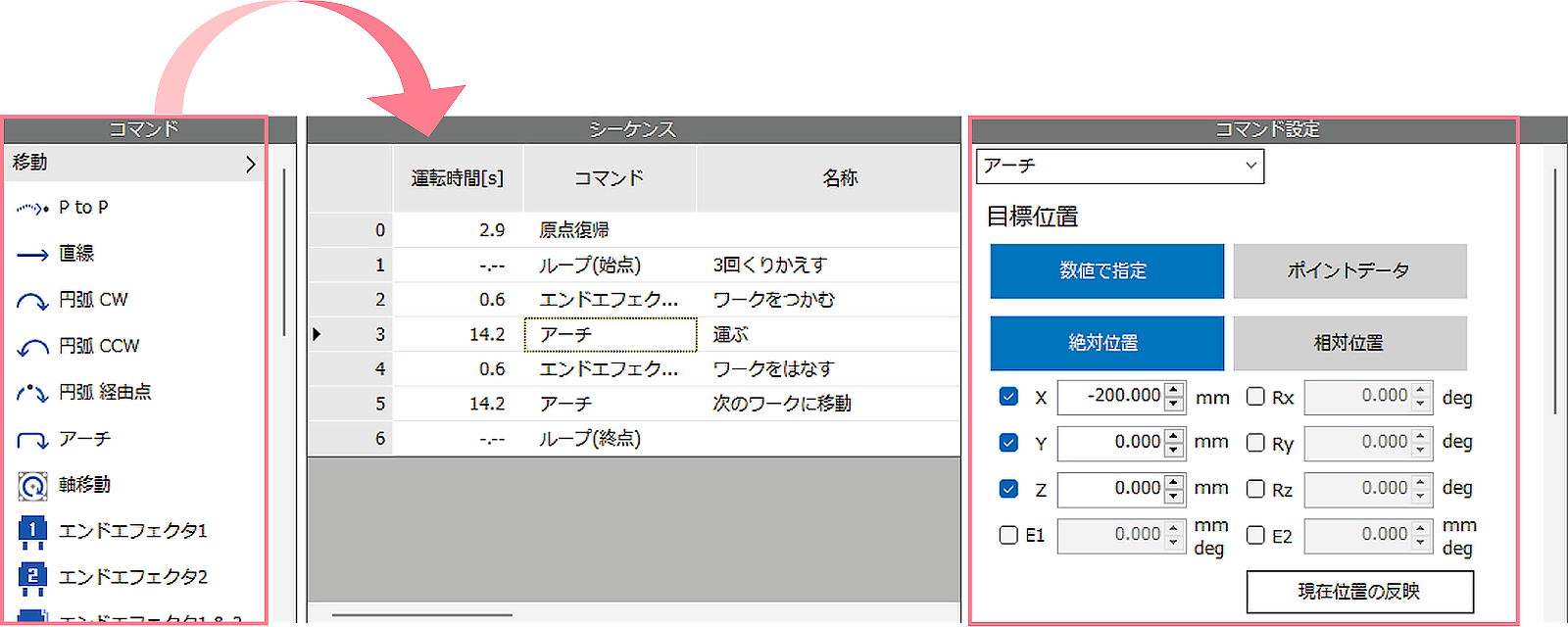
コマンド 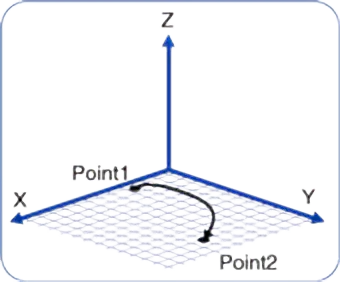
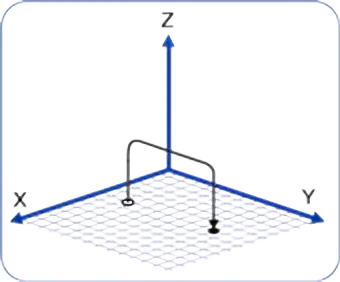
P to P 制御 直線補間 円弧補間(ヘリカル補間) アーチモーション パレタイジング Step3. オンライン3Dシミュレーションで、動作確認。
プログラムの運転時間の表示 、ロボットの可動範囲などを考慮したプログラム内容の検証ができます。
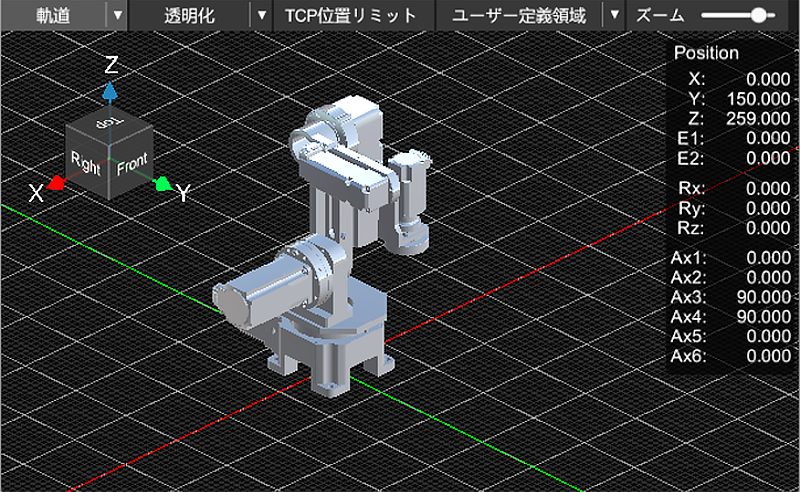
3D グラフィック上で、実機を動かさずに動作を確認することが可能です。※ シミュレーションと実機の動作は差異が生じる可能性があります。
※ シミュレーションは MRC01 との通信が必要です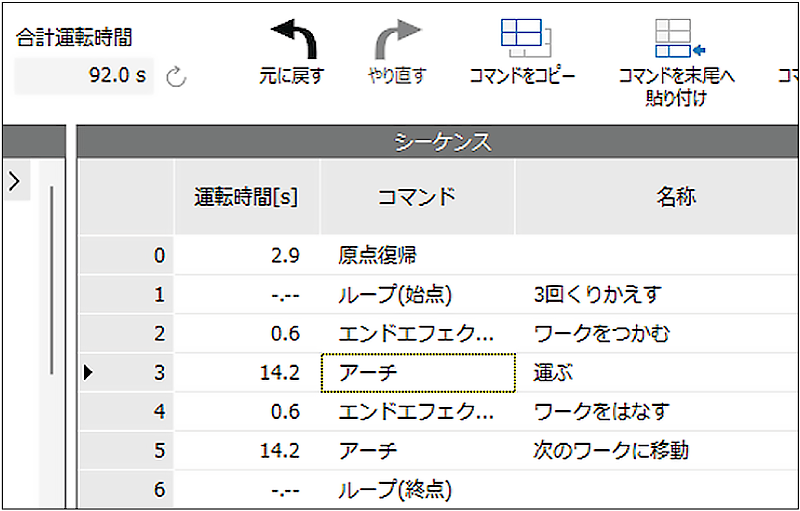
2Dカメラとの連携機能で、さらに高度な作業を自動化
2Dカメラを使ったロボットビジョンシステムの構築
ロボットコントローラ MRC01 は、カメラで取得したワークの位置や角度の情報を使って、ロボットを運転させるための便利な機能を搭載しています。
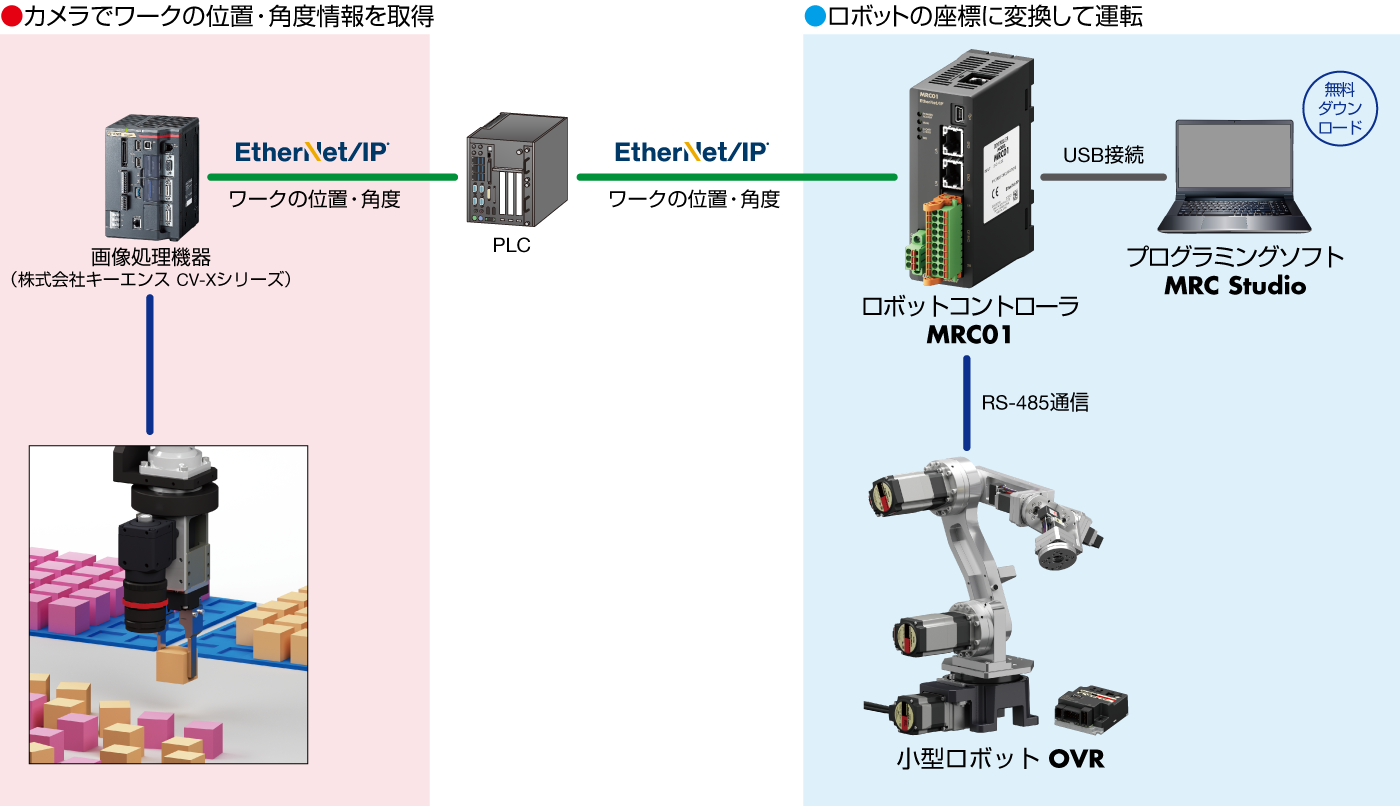
画像処理機器、PLCの対応機種について キャリブレーションについて 上記構成図は、株式会社キーエンス製 CV-X シリーズとの接続例です。 他の対応機種は当社 WEB サイトで順次公開します。 2D カメラと連携するために、MRC Studio を使ってあらかじめキャリブレーションを行います。イラストを見ながら画面の指示に従って操作するだけで簡単に設定ができ、補正工数を削減できます。(カメラは 2 台までキャリブレーションができます。) アプリケーション例
ワークの位置情報検出、寸法・外観検査など、2D カメラとの連携で実現する自動化は数多くあります。 一例をご紹介します。
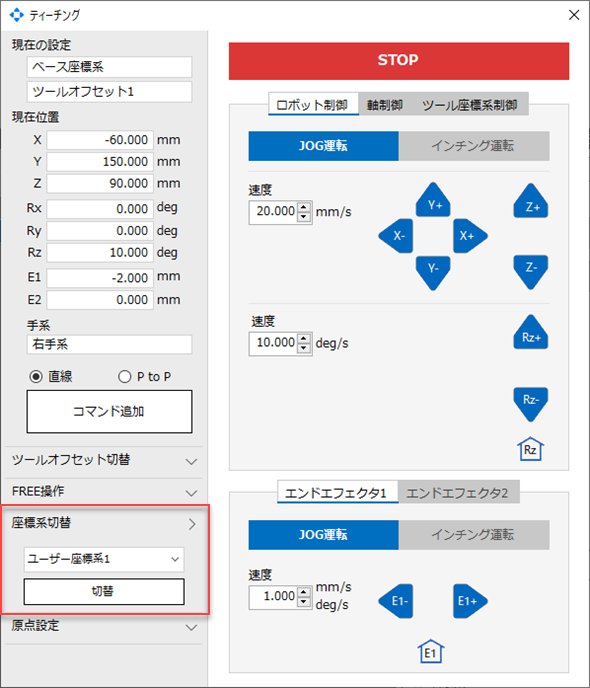
位置補正 色認識 煩雑に並んだワークを整列(固定カメラ方式) 色の違うワークを選別(ハンドアイ方式) 複数のユーザー座標系(ワーク座標系)の設定が可能
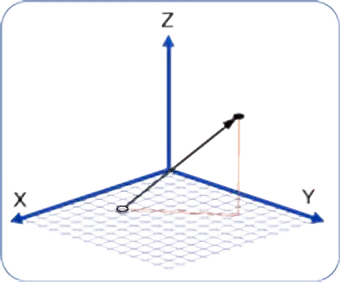
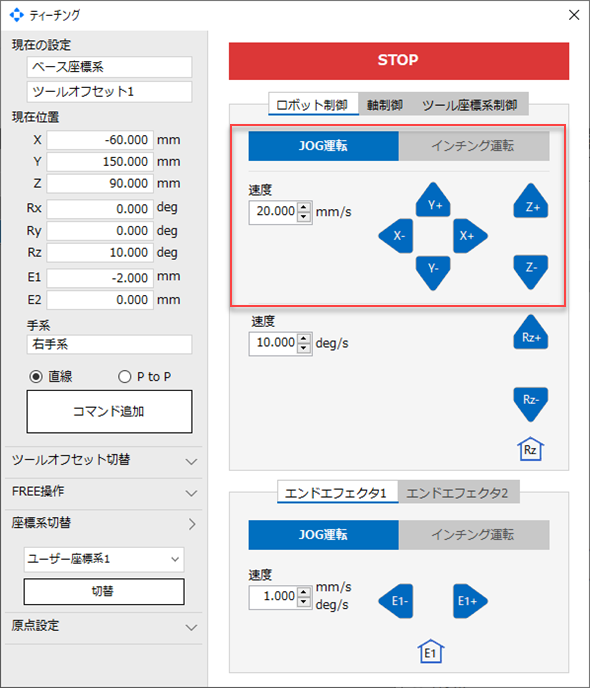
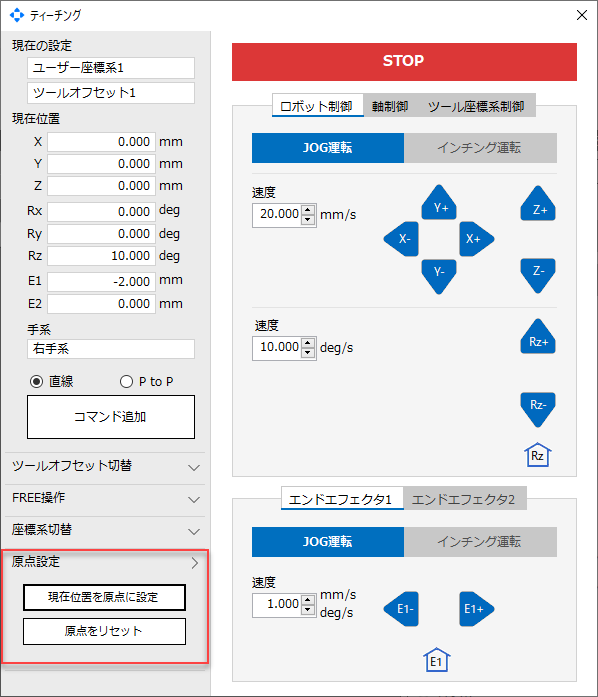
座標系はティーチング画面から設定
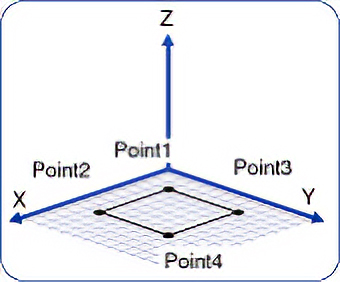
任意の位置を3つまで原点に設定することができます。設定はMRC Studioのティーチング画面からおこないます。
1つのプログラム内で簡単に切替可能
座標系は、運転プログラムの座標系切替コマンドでも変更可能です。1つのプログラムの中に複数の座標系切替コマンドを追加できます。
MRC Studio Simulator 購入前の検討段階でロボットの動作確認が可能
MRC Studio Simulator は、ロボット本体やMRC01がなくても、実際の動きを想定したシミュレーションが可能なソフトウェアです。
MRC Studio Simulator で作成した運転プログラムは、実際のロボット導入時にそのままご使用いただけます。
プログラミングソフト MRC Studio Simulator の詳細はこちら
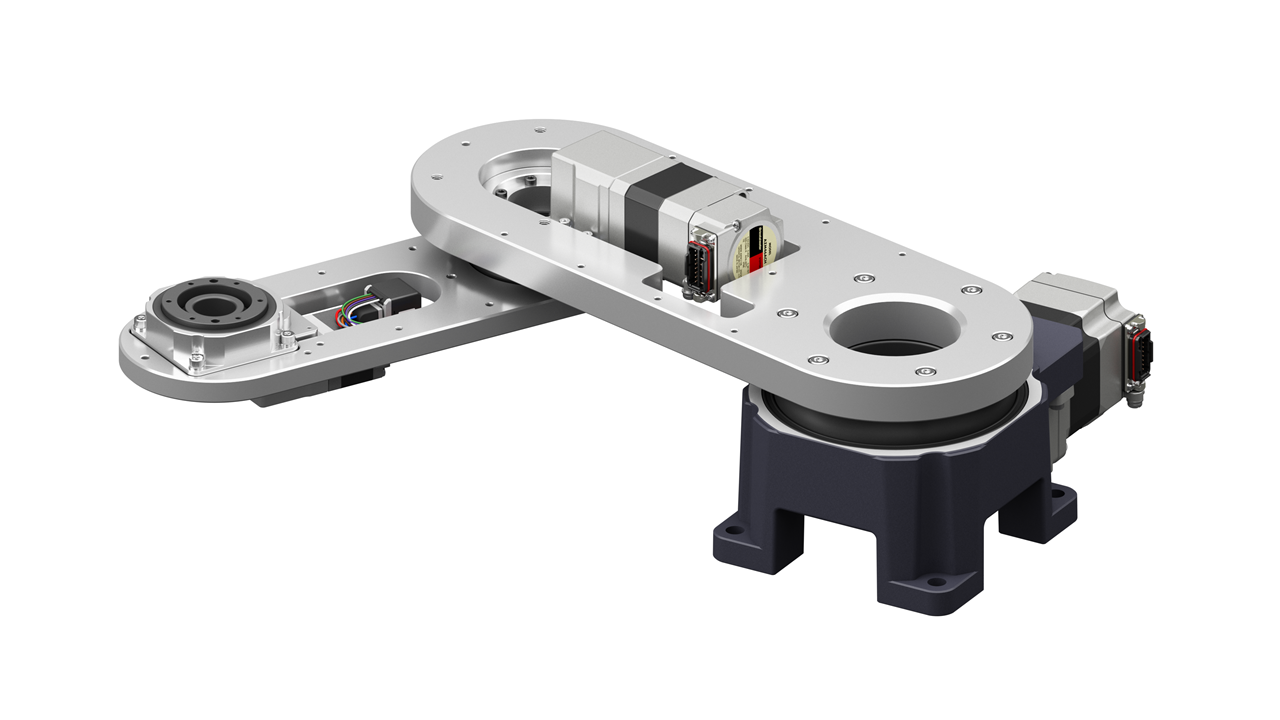
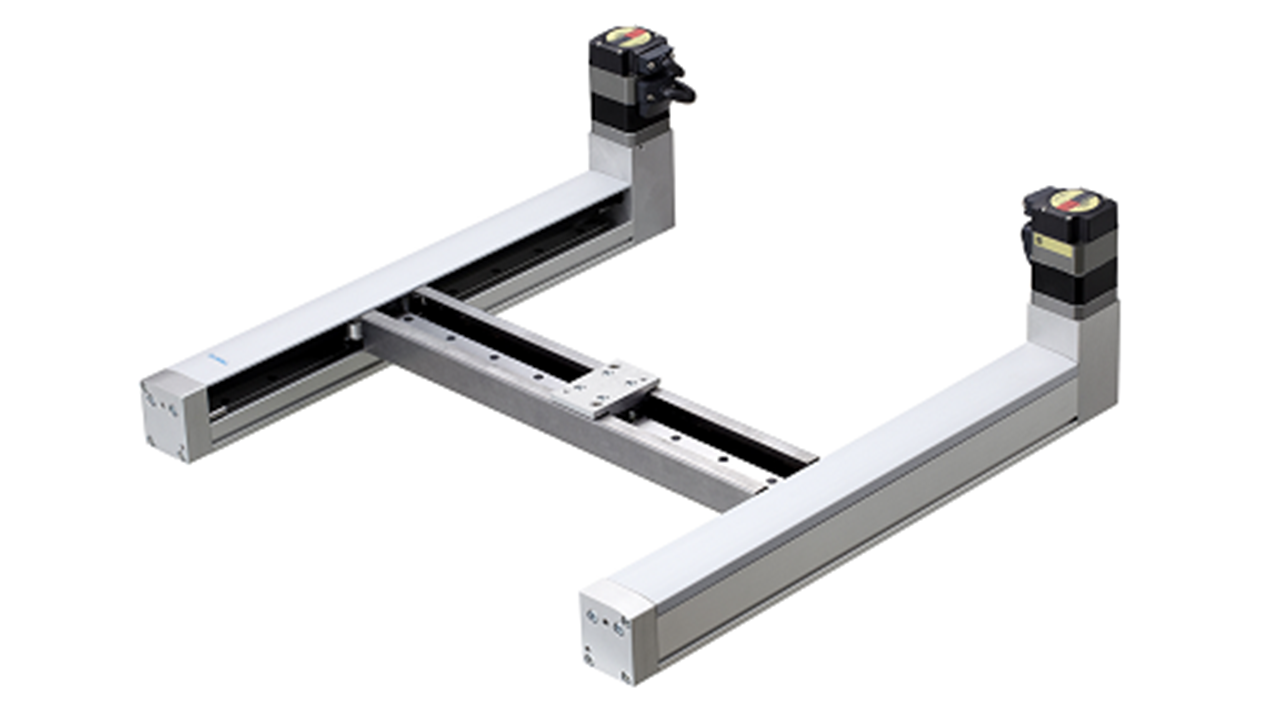
MRC01と組み合わせできるロボット
小型ロボット OVRのほか、AZシリーズおよびAZシリーズを搭載した電動アクチュエータと組み合わせることができます。
ロボットコントローラ用ティーチングペンダント TPW01
MRC Pendant for Tablet(ティーチングペンダントアプリ)をインストールしたタブレット型のティーチングペンダントをご用意しています。
※ 日本国内専用品です。






ロボットで実現したいことはお決まりですか? お気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
