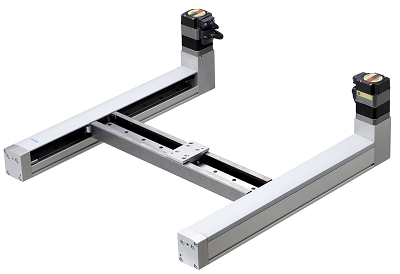
FESTO 平面ガントリ EXCMシリーズ

-
フエスト株式会社製 X-Y軸一体構造の電動アクチュエータです。
部品点数が少ないので、電動スライダを組み合わせた一般的な構造に比べ薄型・軽量(約4kg)です。
モータはオリエンタルモーター製αSTEP(アルファステップ)AZシリーズを使用。
外部センサが不要なので、トータルコストダウンに貢献します。
\パンフレットのダウンロードはコチラ/ \技術相談・見積もり依頼はコチラ/


最新動画 分注デモ機
分注デモ機動画 パート2(X-Y-Zの3軸駆動)
分注デモ機動画 パート1
※動画で作成したプログラムはこちらからダウンロードできます。プログラムを開くためには専用ソフトMRC Studioが必要です。(ソフトのダウンロードはこちら)
特徴
省スペースで配置・配線設計スッキリ! まずは動画でご確認ください
ワーキングスペースの最大化
モータを除く高さが54mmの薄型・フラット構造。
Y軸モータの張り出しがなく、さらにケーブルが可動しないためケーブルベアが不要なことから、
最小の設置スペースで最大のワーキングスペースが確保できます。
■EXCMシリーズ ■従来のガントリ
軽量化(約4kg)
XーY軸が一体構造。従来の単軸を組み合わせたガントリに比べ部品点数が少なく、本体質量が約4kgと大幅に軽くなりました。
装置の軽量化に貢献します。
トータルコストダウン
可動ケーブル・ケーブルベア不要
X-Y動作中に2つのモータは移動しないため、ケーブルへの機械的ストレスがありません。
したがって可動ケーブルやケーブルベアが不要となり、コストダウンに貢献します。
外部センサ不要
αSTEP AZシリーズに搭載した機械式アブソリュートセンサ「ABZO(アブゾ)センサ」は常時位置情報の管理ができるため、
原点復帰運転に必要だった外部センサを削減できます。これにより部品コストや配線時間だけでなく、
断線や誤検出といったセンサが原因のトラブルを減らせるためトータルコストダウンに貢献します。
■バッテリレスの機械式アブソリュートセンサ(ABZOセンサ)
アプリケーション例
最小の設置スペースで最大のワーキングスペースが確保できますので、研究施設・ラボでの使用に適しています。
もちろん生産設備にもお使いいただけます。

動作原理
XーY軸を1本のベルトでリンクした新構造ガントリ機構。2つのモータの回転方向の組み合わせによりXーYの移動方向が決まります。
X方向へ移動する場合は2つのモータを逆方向に 回転させ、Y方向へ移動する場合は2つのモータを同方向に回転させます。
さらに片側のモータのみ回転させると斜め45°に動作します。
より詳しい内容は下の動画をご覧ください(3:33付近から動作原理について説明しています)。

主な仕様
モータとドライバは別売りです。モータの組付け方法はこちらをご覧ください。
| 型式 | EXCM-30 | EXCM-40 | |
| ガイド | リニアガイド | ||
| ストローク | X軸 mm | 基本:100,150,200,300,400,500 (90~700mmまで1mm単位で設定可能) |
200~2000mmまで1mm単位で設定可能 |
| Y軸 mm | 基本:110,160,210,260,310,360,410,460,510 (110~510mmまで1mm単位で設定可能) |
200~1000mmまで1mm単位で設定可能 | |
| 搬送質量 (最大動的応答時の定格負荷) |
水平 kg | 3 | 4 |
| 垂直 kg | 2 | 使用不可 | |
| 最高速度 | mm/s | 1000 | 2000 |
| 許容加速度 | m/s2 | 10 | 20 |
| 繰り返し位置決め精度 | mm | ±0.05 | ±0.1 |
| 質量 | 基本 kg | 2.7 | モータ上付き:16.7 モータ下付き:17.5 |
| ストローク100mmあたりの 加算質量 kg |
X軸:0.474 Y軸:0.240 |
X軸:1.75 Y軸:0.89 |
|
| 使用周囲温度範囲 | ℃ | 10~45 | 10~50 |
| 保護等級 | IP20 | IP40 | |
| 外形図 | |||
| おすすめモータ | αSTEP AZシリーズ AZM46(AC/DC入力) | αSTEP AZシリーズ AZM66(AC/DC入力) | |
■品名の見方
EXCM - 30-300-210-KF-W-B-EN
① ② ③ ④
①型番
②X軸ストローク(mm)
③Y軸ストローク(mm)
④モーター取付方向(下図参照)

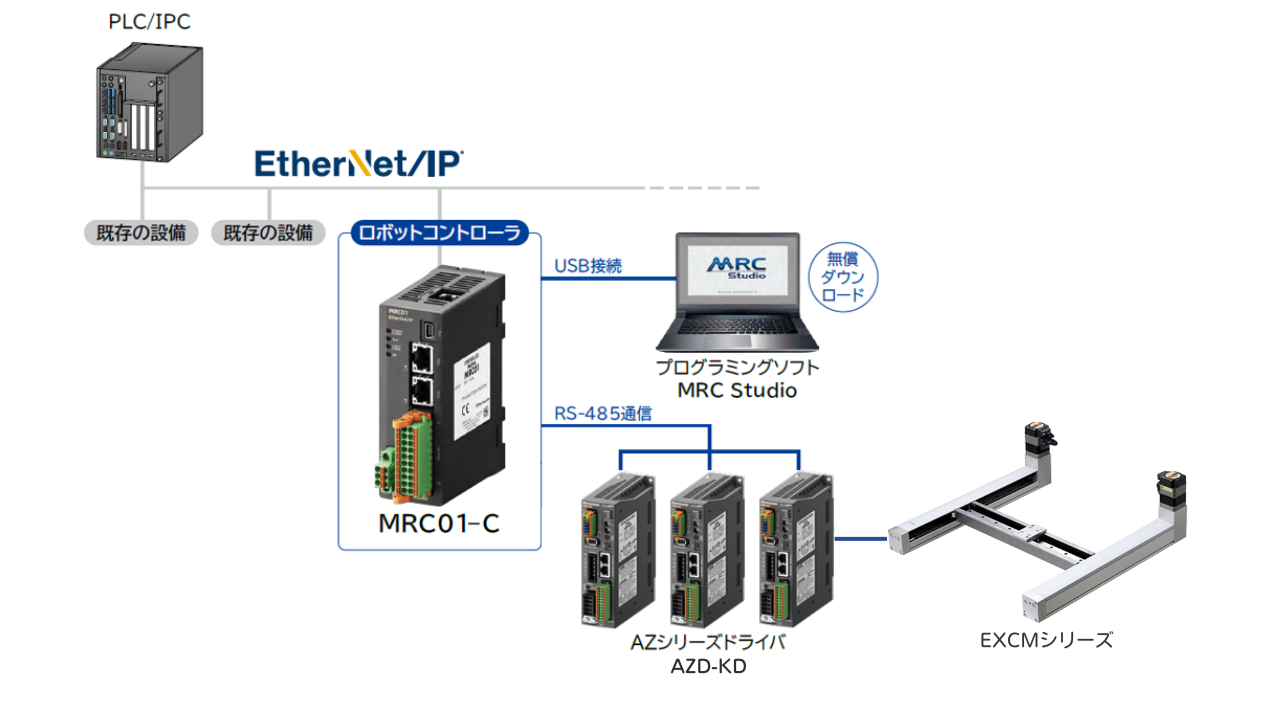
システム構成
ロボットコントローラMRC01-CとプログラミングソフトMRC Studioを使用することで簡単にロボット制御が可能です。
MRC01-Cに接続できる推奨ドライバは DC 電源入力タイプの小型ドライバ AZD-KD、またはminiドライバAZD-KR2Dです。
専用コントローラ・ソフトで簡単制御

ロボットコントローラMRC01-Cは、直交ロボット専用のコントローラです。
ロボットコントローラMRC01-Cの詳細はこちら
プログラミングソフトMRC Studioは(無料)はロボット制御未経験者でもすぐにマスターできるほど簡単なソフトです。
ダウンロードはこちら
MRC01とドライバを一体化したロボットコントローラユニットもラインアップ。
ロボット導入における制御のハードルを下げ、立ち上げ時間の短縮に貢献します。
ロボットコントローラユニットMRCUシリーズの詳細はこちら
\パンフレットのダウンロードはコチラ/ \技術相談・見積もり依頼はコチラ/
その他直交ロボット商品
その他の直交ロボット・平面ガントリのご案内です。
小型ロボットOVR 3軸直交 ストローク:300mmx300mmx100mm(X-Y-Z)

-
・可搬質量は2.5㎏
・繰り返し位置決め精度 ±0.02mm
・アブソリュートエンコーダ搭載AZシリーズ採用により外部センサ不要
詳しくはこちら>>
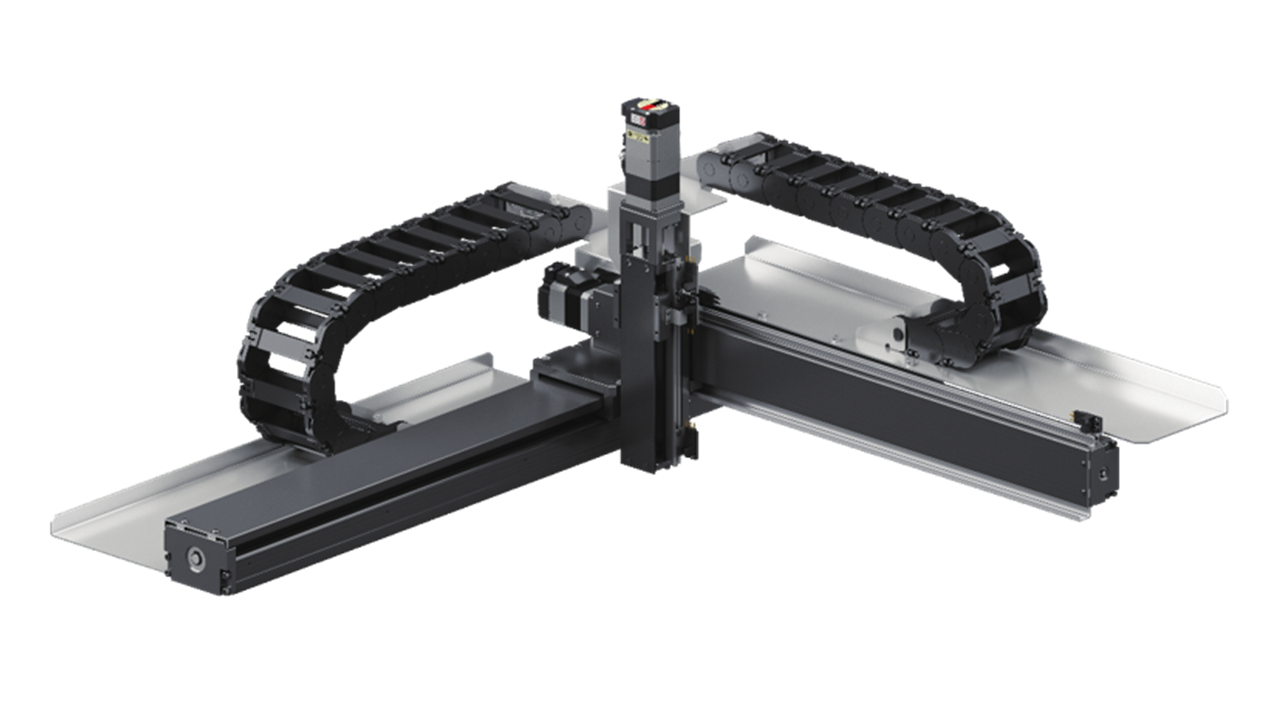
FESTO製 ロングストローク 直交ロボット
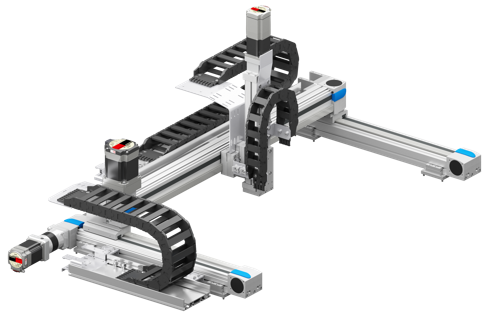
-
・各軸のストロークは自由に設定可能
・高速・ロングストローク ベルトスライダユニット
・3軸XYZのガントリ機構の場合、最大X軸2600mm・Y軸900mm・Z軸600mm
・CADデータと実物は組み立て済みで納品
詳しくはこちら>>
THK製 電動スライダX-Y-Zユニット ストローク:500mmx500mmx100mm(X-Y-Z)
-
・可搬質量は4.5㎏
・繰り返し位置決め精度 ±0.01mm
・アブソリュートエンコーダ搭載AZシリーズ採用により外部センサ不要
詳しくはこちら>>
ロボットで実現したいことはお決まりですか? 気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
