No.17 オリエンタルモーター製ロボットコントローラ MRC01をレビューしてみた!
-

オリエンタルモーターより発売されているロボットコントローラ MRC01。
キャッチコピーに「初期設定」・「動作プログラミング」・「動作確認」の『3ステップで誰でもロボットマスター。』
とありますので、このコントローラでロボットアームを実際に動かしてみました。設定方法や各種コマンドによる動き、
使い勝手についてレビューします。目次
ロボットコントローラ MRC01とは ≫
レビューに使用した製品≫
レビュー開始!≫
- 設定してみた≫
- ティーチングしてみた≫
- いろいろなコマンドを試してみた≫
・PtoP制御.直線補間≫
・円弧補間.ヘリカル補間≫
・アーチモーション≫
- プログラミング運転してみた≫
まとめ≫
ロボットコントローラ MRC01とは
MRC01とはどのような製品なのでしょうか?概要をまとめる次のような特徴のようです。
●さまざまなロボットに対応 (ロボット全種はこちらから)
オリエンタルモーター製αSTEP(アルファステップ)AZシリーズ搭載 電動アクチュエータを使用したロボットをかんたんに導入・
制御できるロボットコントローラ。垂直多関節・水平多関節(スカラ)・直交ロボットなど代表的なタイプのロボットに対応。
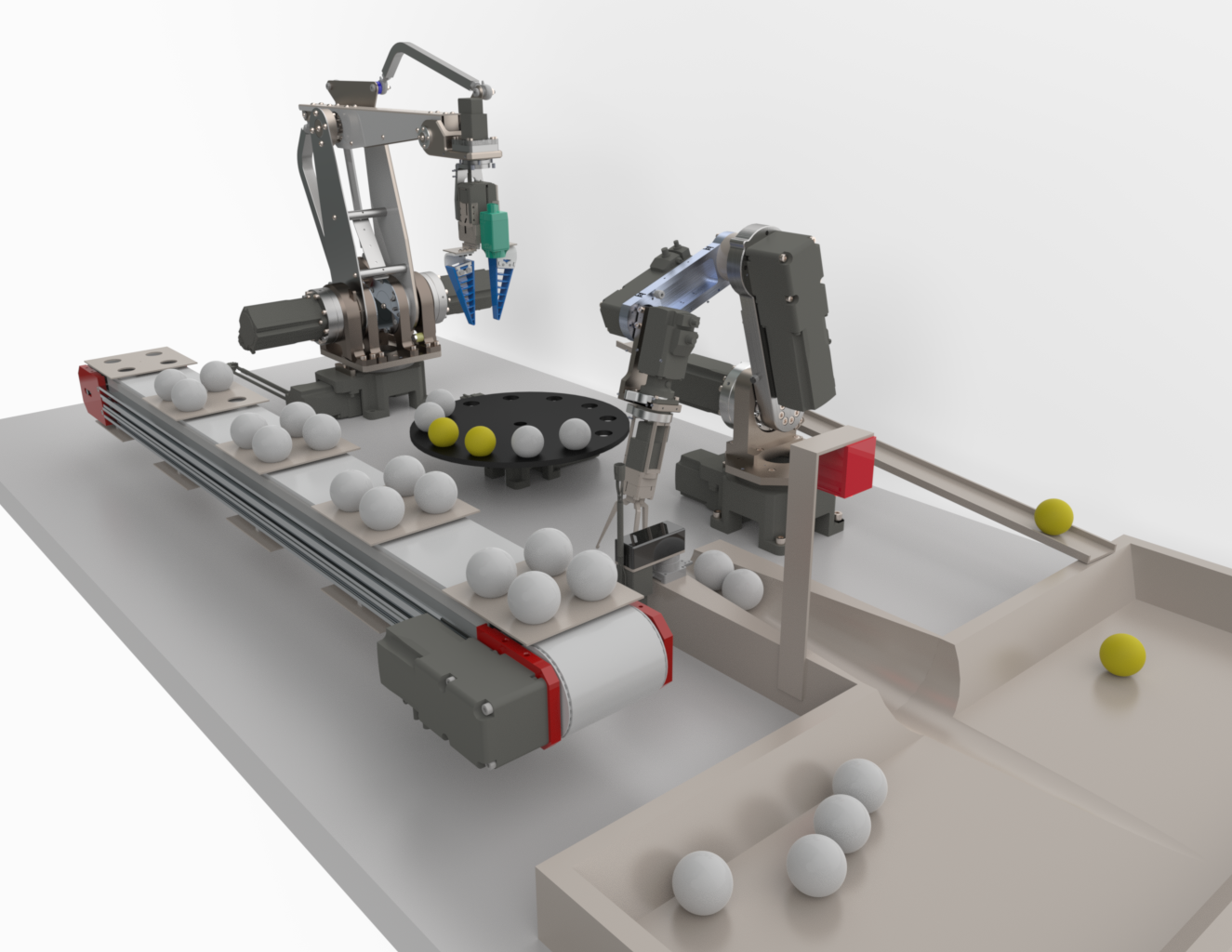
動画はオリムベクスタ製垂直多関節ロボットアーム OVR680K5を制御した様子です。
●初めてでも、かんたんセットアップ
ロボットの初期設定から動作プログラムまで、かんたんに設定できるプログラミングソフト MRC Studioをご用意。
ロボットタイプの選択や機構情報の入力など、一連の初期設定はウィザード形式。イラストを見ながらガイダンスの
指示に従ってはじめてでも簡単に設定可能。
MRC01のパンフレットはこちら≫
レビューに使用した製品
オリムベクスタ製4軸多関節ロボットアームとオリエンタルモーター製電動グリッパを使用しました。ロボットアームと
グリッパの詳しい情報はこちらをご覧ください。システムはPLCを使わず、設定や指令はパソコンにより行いました。
なお同じ構成のデモ機がオリムベクスタのショールームにございます。オンラインでのご説明も行っておりますので、
お気軽にお問い合わせください。
ご注意:ロボットアームの取り扱いは、電気・機械工学および安全に関する専門知識を持つ有資格者が行ってください。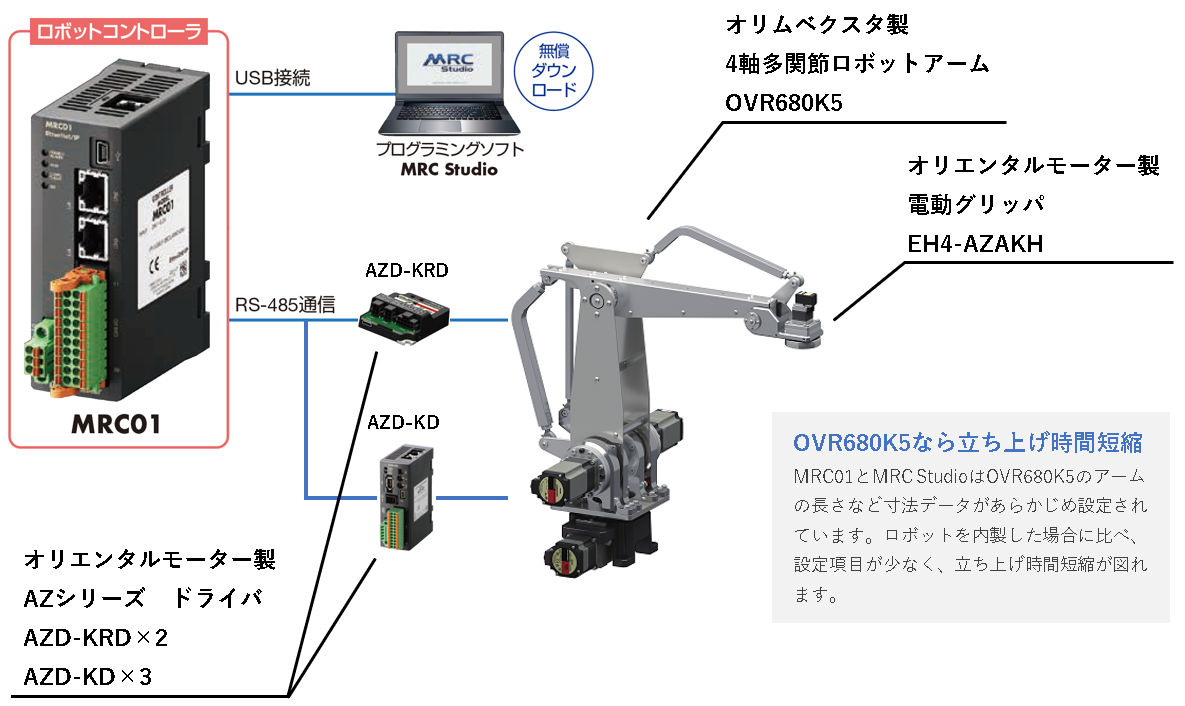
参考ページ:垂直多関節ロボットアーム採用事例 「価格」や「スペック」だけじゃない。オリムベクスタのロボットアームを選んだポイントとは。
ロボットアームや各製品の価格・仕様のお問い合わせはこちら ≫
レビュー開始!
設定してみた
本当に簡単に設定できるのでしょうか?さっそくレビューを始めます。
まずはプログラミングソフト MRC Studioをダウンロード。そして軸の機構設定までやってみました。ここまでが前半です。続きましてロボット情報の設定です。
約6分で設定完了しました。MRC01とMRC Studioはロボットアーム OVR680K5の情報を設定済なので、アームの長さなど
寸法の入力が不要でした。ロボットを内製した場合は各軸の寸法を入力する必要があるので、もう少し時間がかかるかもしれません。ティーチングしてみた
続きまして座標データの設定、ティーチングです。JOG運転で動かしながらティーチングしてみました。カメラで検出した座標で動かす『ダイレクトデータ転送』
カメラでワークの色や形状を検出して、移載させることも可能です。
ロボットはもちろんカメラを含む周辺機器の設定やプログラムもサポートします。各種設定やティーチングについてのお問い合わせはこちら ≫ いろいろなコマンドを試してみた
運転のコマンドはPtoP制御、直線補間、円弧補間(ヘリカル補間)、アーチモーションに対応。それぞれのコマンドで
ロボットアームを動かしてみました。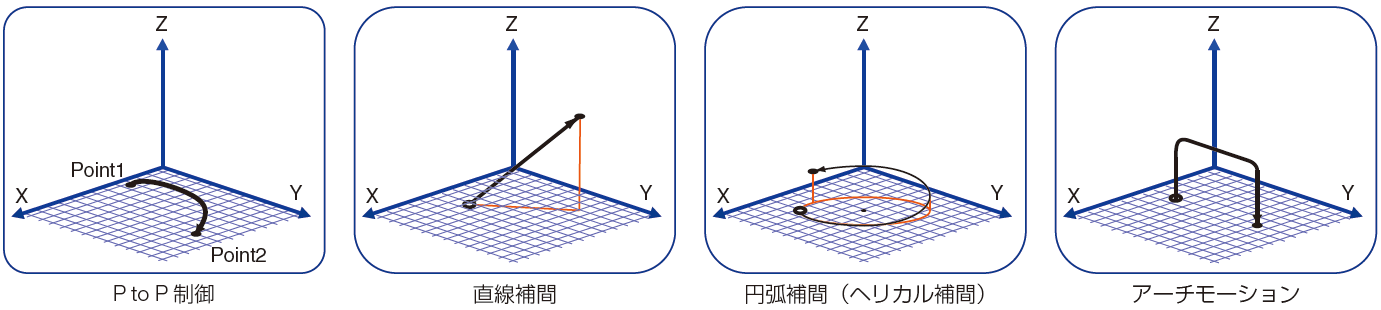
●PtoP制御.直線補間
どちらも2点間の移動ですが軌跡が異なりました。PtoP制御は始点と終点の座標しか管理していないため、やや弧を
描きながら移動するのに対して、直線補間は最短距離で移動しました。直線補間は軌跡が明確なため他との干渉を避ける検討をしやすくなりますが、一方でMRC01はTCP(ツールセンターポイント)の
移動速度をMax 500mm/secに設計しているため高速動作には不向きです。 その点PtoP制御は、軌跡の確定はできませんが
チューニングにより速度を上げることができます。そのあたりの違いに注目していただき、こちらの比較動画をご覧ください。同じ移動距離ですが、PtoP制御は約半分の時間で動作が完了しました。タクトタイム短縮にはPtoP制御のほうが良さそう
です。ただ直線補間の特徴を活かすと、平面と一定の距離を保ちながらカメラで検査したり液体を塗布するような用途
でも活用できるので、目的に合わせて使い分け出来そうです。●円弧補間.ヘリカル補間
両方とも円を描く動きですが、ヘリカルはZ軸方向の座標情報が加わります。動きの違いを動画でご覧ください。●アーチモーション
アーチのような軌跡を描くコマンドで、1つのデータで上昇→横移動→下降を行います。同じ動作を直線補間で行う場合は
それぞれの動作にデータが必要ですので、アーチモーションを用いることによりプログラム作成時間の削減に貢献します。
2つの違いがわかるように動画を撮影しましたのでご覧ください。各種コマンドについてのお問い合わせはこちら ≫ 最後にプログラミングして連続的な動きをさせてみました。プログラムはコマンドを選択・追加するだけなのでラダー
などの専門知識がなくても直感的に作成できました。また直線補間・ヘリカル補間・アーチモーションと異なるコマンド
を混在させましたが、特殊な操作もなく簡単に行えました。
しかし。いざ動かすとなると、ちょっと不安が。『間違って逆方向に動いたらどうしよう・・・』『誤った数値で動きすぎて
しまうとロボットを壊してしまうかもしれない・・・』。そんな時はシミュレーションモードがおすすめです。
ロボットを動かさず3Dのグラフィックモニタでプログラムした動作を確認できます。シミュレーションの動画はこちら。シミュレーションにより想定通りの動作ができることが確認できましたので、実際に動かしてみました。
問題なく動かすことが出来ました。ヘリカル補間は支柱を避けて左奥と手前を行き来する際、またアーチモーションは
支柱に対してワークを置く際に効果的であることが動画からわかります。まとめ
ロボットコントローラ MRC01とプログラミングソフト MRC Studioで簡単にロボットアームを動かすことが出来ました。
ロボットを導入する際に抱くハードルが高いイメージ(講習会への参加・難しい操作方法の習得など)が良い意味で裏切られる
結果となりました。現在ロボットをご使用中のお客様だけでなく、はじめて導入を検討されるお客様にもおすすめです。
オリムベクスタでは今回のレビューで使用したロボットアームとロボットコントローラの立ち上げサポートも行って
おります。まずはお気軽にご相談ください。