オリエンタルモーター 電動グリッパ EHシリーズ
-
【特 徴】
人の指先のようなデリケートな「つかみ」を実現、自動化・省人化をお手伝い
■ 小型・軽量 ロボットへの負担を最小限に
■ 電動グリッパはつかむ時だけ「ゆっくり」または「徐々に加圧」が可能
■ 動作範囲で「ワークのサイズの測定」や「ワーク有無の判断」が可能
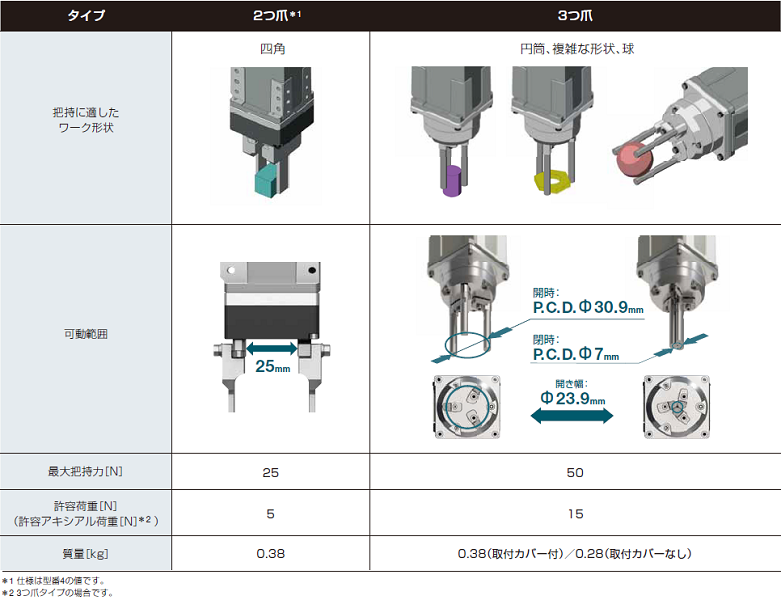
■ 最大把持力:7N(EH3-AZAKH)/50N(EH4T-AZAK▢)
■ 3つ爪チャックを用意しました。



多種多様なワークに、「デリケートなつかみ」でアプローチ
運転電流を1%単位で調整することによる把持力の微調整と低速でワークにアプローチすることでデリケートなつかみを実現します。
つかむ
| 傷つきやすく、変形しやすいワークの 把持が可能。  |
| 3つ爪タイプは、球体や円筒・円柱の 把持が可能。 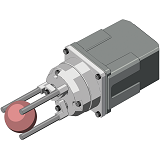 |
[球体] [円柱(ピン)] 動画で使用している垂直多関節ロボットアームの詳細はコチラ⋙ |
そろえる
ワークの向きそろえ、位置そろえが可能。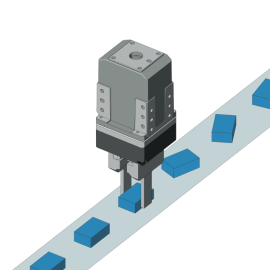 |
測定する
ワークの大きさ判定、大きさ測定が可能。 |
駆動モーターにαSTEP(アルファステップ) AZシリーズを搭載
●バッテリレスのアブソリュートセンサ内蔵、外部センサ不要でモーター位置情報を常時監視
●クローズドループ制御による高信頼性
●高効率化により、モーター発熱低減、省エネルギー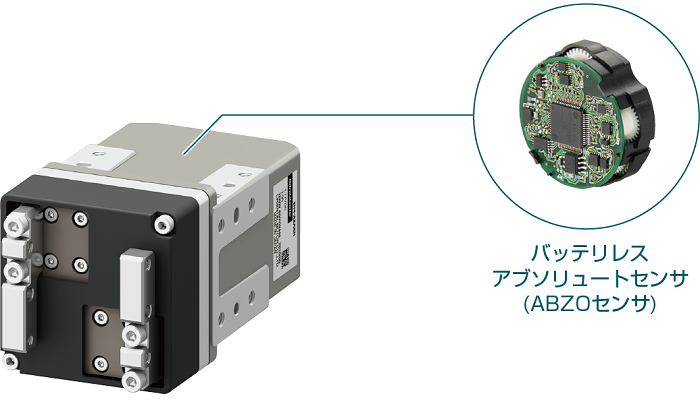
品名の見方とラインアップ
●品名の見方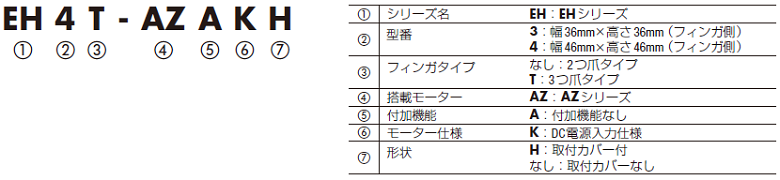
|
[2つ爪タイプと3つ爪タイプの比較] |
●ラインアップ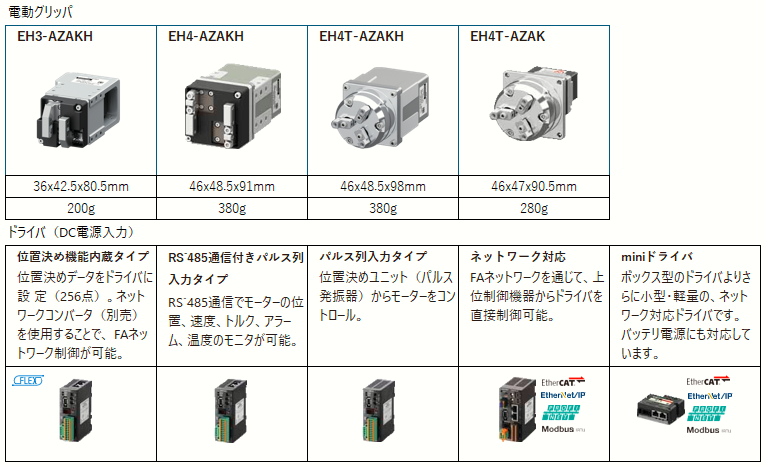
ドライバの詳細はコチラ⋙
関連記事:No.22 徹底比較 第2弾! エンドエフェクタ 5メーカー 11シリーズを比べてみた!!
ロボット用取付フランジを用意しました。
市販の産業用ロボットに、電動グリッパEHシリーズなどのエンドエフェクタ機器を取り付けるためのフランジです。治具の設計や製作の工数低減に貢献します。
ロボット側の取付フランジは、ISO9409-1(JIS B 8436)に準拠した形状です。
各社ロボットメーカーのスカラロボットや垂直多関節ロボットへ取り付けできます。 
| 品名 | ロボット側対応ISO規格 | エンドエフェクタ側適用製品 | |
| シリーズ | 適用製品 | ||
| P3F1 | ISO 9409-1-31.5-4-M5 準拠 | 電動グリッパ EHシリーズ αSTEP AZシリーズ搭載 |
EH3-AZAKH |
| P3F2 | EH4(T)-AZAKH | ||
| P5F1 | ISO 9409-1-50-4-M6 準拠 | EH3-AZAKH | |
| P5F2 | EH4(T)-AZAKH | ||
