FESTO ELGT組付け電動スライダ
Festo ELGTシリーズ
-
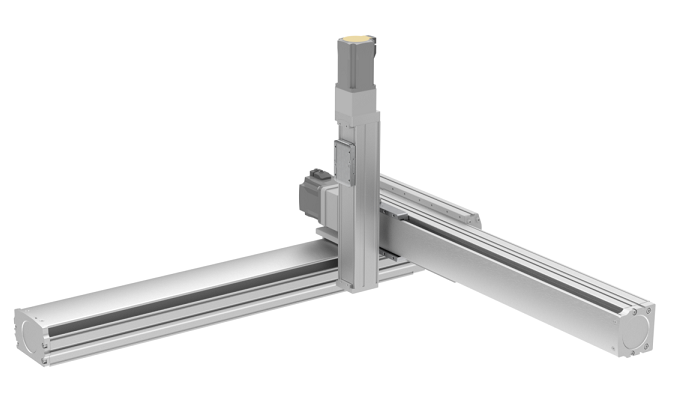
・ダブルガイド構造ながらコンパクトなデザイン
・銅と亜鉛の含有率は1%未満
・最適化されたアクチュエータデザインによる設置スペースと稼働スペースの最適化を実現
・豊富なアダプタ組付キットを使用して自在な 3軸構成 -


ダブルガイドを使用しているため、3軸構成でも張り出し軸のサポート用LMガイドを必要としません。また、アダプタキットが豊富に用意されており
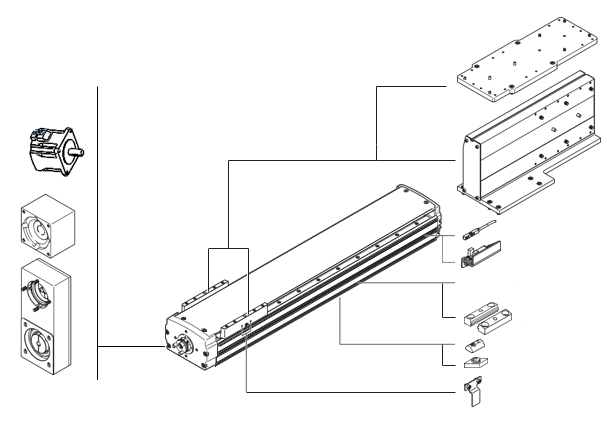
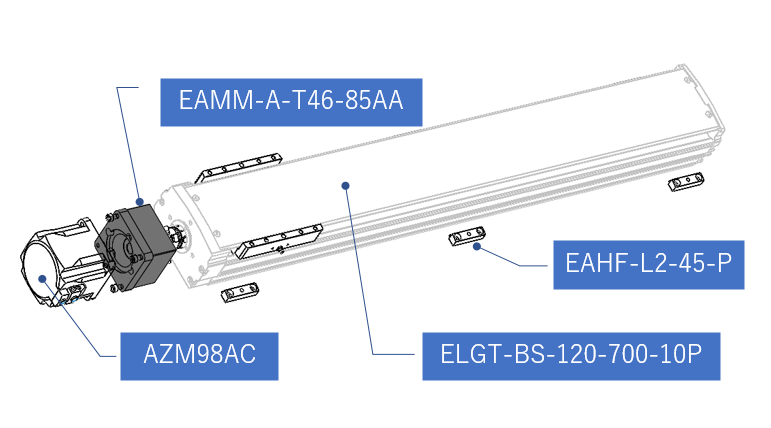
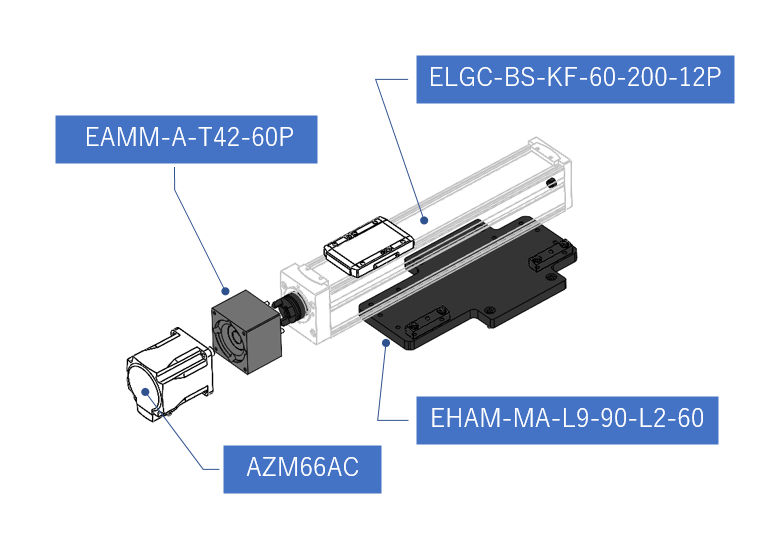
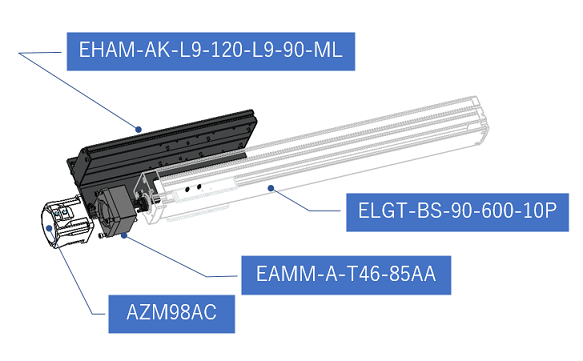
アクチュエータどうしを組付けて直角方向に軸を取り付ける アングルキット(EHAM-MA-L9)
アクチュエータどうしを組付けるアキシャルキット(EHAM-AK-L9)
モータの直列に組付ける(EAMM-A)を使用することで、1軸、2軸、3軸の構成を自在に組み上げることができます。
品名
ELGT-BS-90-600-10P
① ② ③ ④
①:ボールネジ
②:サイズ
③:ストローク
④:ボールねじリード
仕様値
| サイズ | ボールねじリード [mm/rev] |
ストローク [mm] |
許容速度 [mm/s] |
繰返し位置決め 精度[mm] |
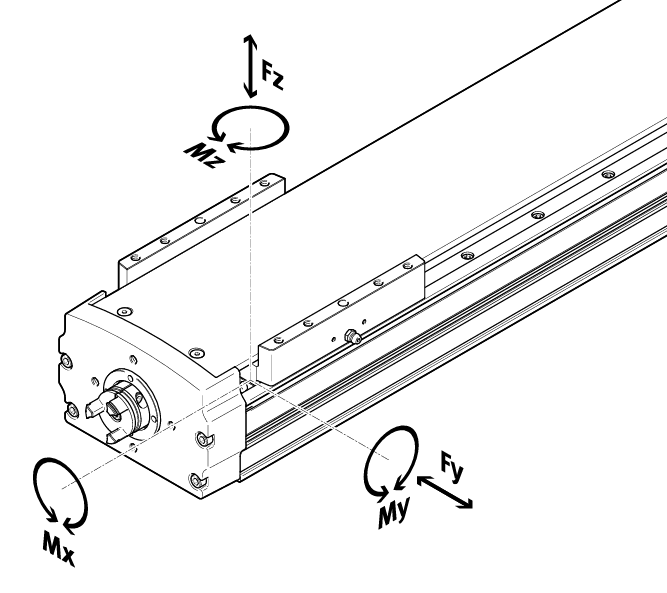
推力 | モーメント | ||||
| Fx[N] | Fy[N] | Fz[N] | Mx[Nm] | My[Nm] | Mz[Nm] | |||||
| 90 | 10 | 50,100,200~1000 | 500 | ±0.02 | 1000 | 4710 | 5600 | 65 | 51 | 51 |
| 20 | 50,100,200~1000 | 1000 | ±0.02 | 500 | 4710 | 5600 | 65 | 51 | 51 | |
| 120 | 10 | 100,200~1100 | 500 | ±0.02 | 1000 | 6800 | 8090 | 300 | 310 | 310 |
| 20 | 100,200~1100 | 1000 | ±0.02 | 500 | 6800 | 8090 | 300 | 310 | 310 | |
| 160 | 10 | 100,200~1400 | 500 | ±0.02 | 1575 | 9550 | 11370 | 600 | 560 | 560 |
| 20 | 100,200~1400 | 1000 | ±0.02 | 1000 | 9550 | 11370 | 600 | 560 | 560 | |
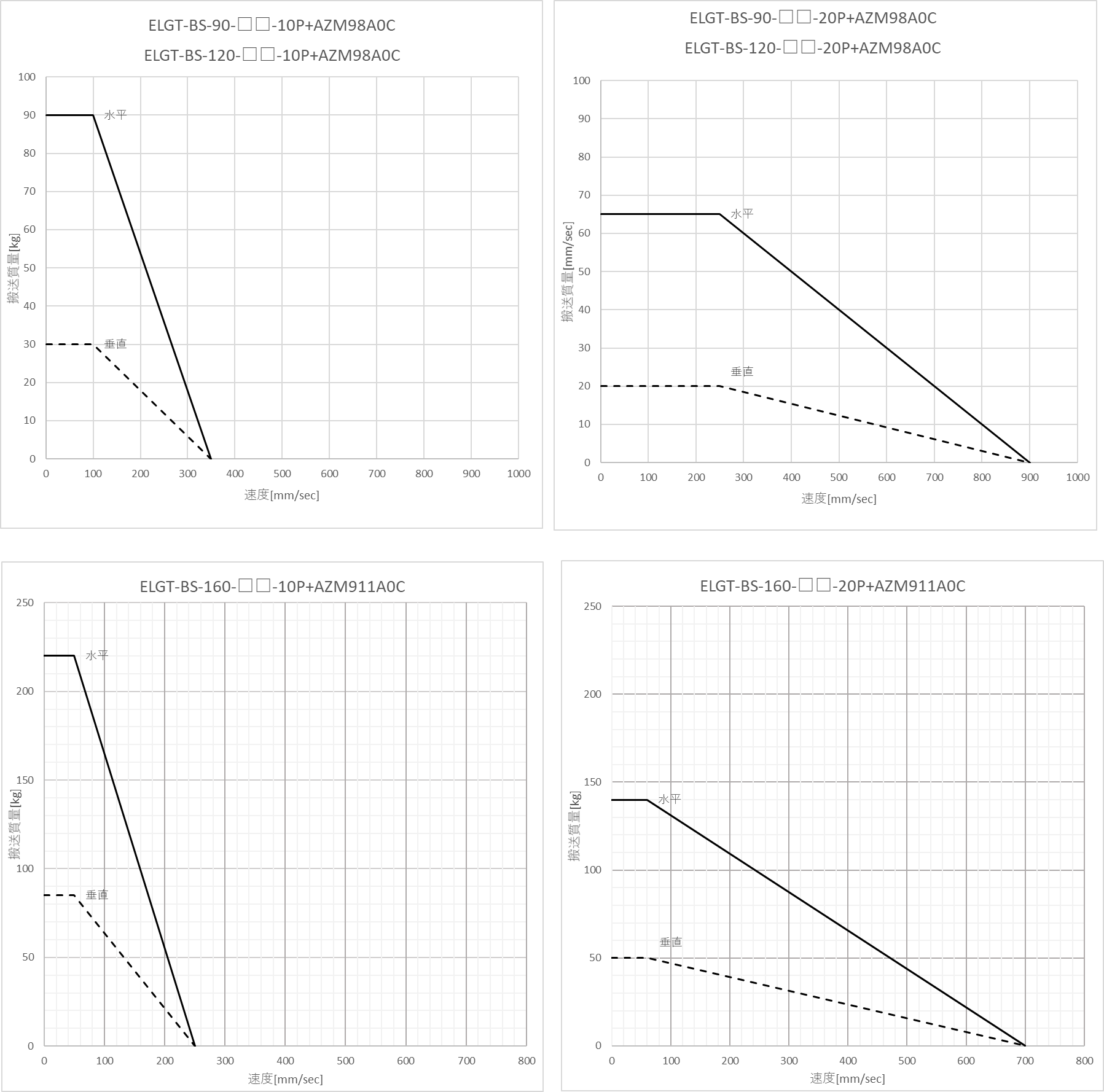
特性図
D.I.Y 3軸組立て
アダプタキットを使用してX-Y-Z (500mm x 500mm x 200mm)の直交ロボットを製作してみます。αSTEP AZシリーズモータを使用することで、原点センサ、リミットセンサをつける必要はありません。
位置決め内蔵タイプのドライバを使用すると、多点間の繰り返し往復運転もタッチパネルのSTART信号のみで動作せることができます。PLCを使用せず運転が可能です。
|
|
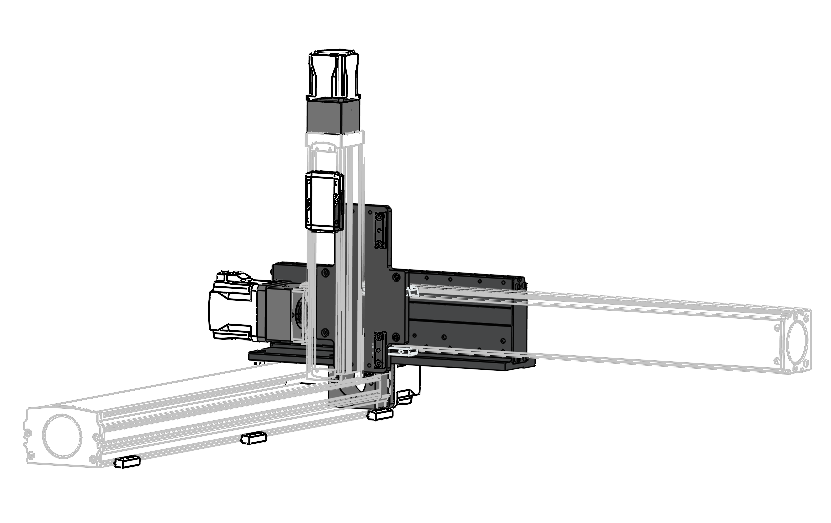
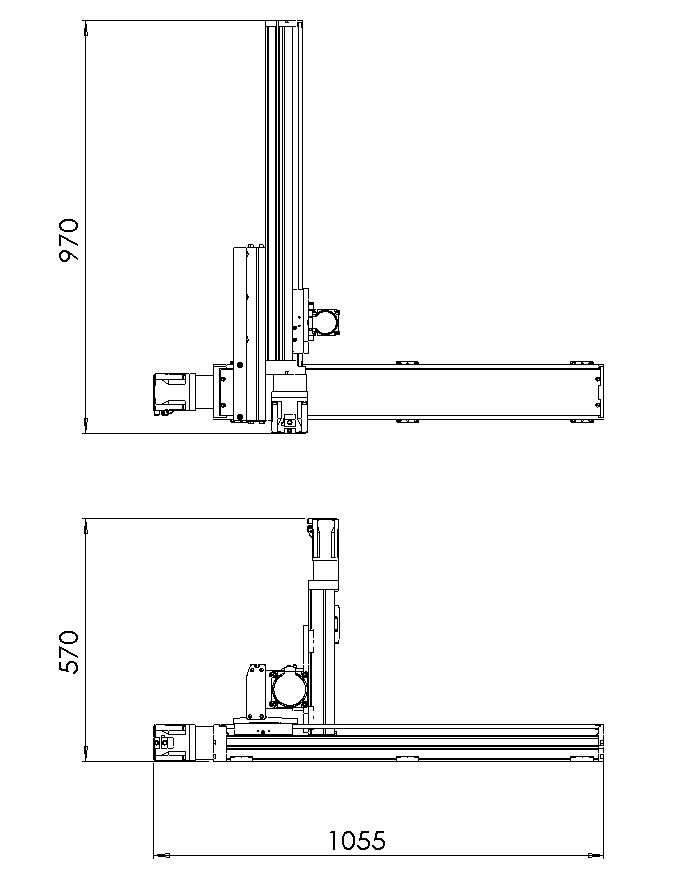
外形図 500mm x 500mm x 200mm
推奨ドライバ
AC電源入力タイプのドライバAZD-AD(100V入力)またはAZD-CD(200V入力)になります。直交ロボット、モータ以外は別手配となります。
制御機器(シーケンサ、PLCなど)上位のコントローラにあわせてドライバをお選びいただけます。



パルス列タイプ 位置決め機能内蔵タイプ ネットワーク対応ドライバ
| ドライバタイプ | 単相100-120V用 | 単相/三相200-240V用 | |
| ドライバ単体 (単軸) |
パルス列タイプ | AZD-A | AZD-C |
| 位置決め機能内蔵タイプ | AZD-AD | AZD-CD | |
| RS485通信/パルス列入力タイプ | AZD-AX | AZD-CX | |
| EtherNet/IP対応 | AZD-AEP | AZD-CEP | |
| EtherCAT対応 | AZD-AED | AZD-CED | |
| PROFINET対応 | AZD-APN | AZD-CPN | |
| MECHATROLINKⅢ対応 | AZD-AM3 | AZD-CM3 | |
| SSCNETⅢ/H対応 | AZD-AS3 | AZD-CS3 |
ストロークを長くする場合はモータの選定計算が必要です。ご相談ください。
ケーブルベアを使用して屈曲対策をしてください。接続ケーブルは可動ケーブルをご用意ください。ケーブルについてはこちら⋙
制御コントローラ
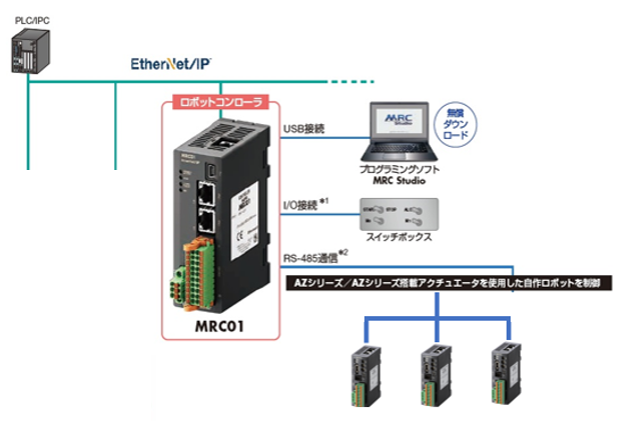
ロボットコントローラMRC01(このロボットを簡単に動かせるコントローラです)
| プログラミングソフト MRC01 MRCStudio  |
「初期設定」「動作プログラミング」「動作確認」の3ステップ
|
