No.35 ロボットコントローラMRC01 EtherNet/IPにつないでロボットを使いこなそう
ロボットコントローラMRC01を使用すれば、プログラムが簡単に組めるため、装置へのロボット投入がスムーズに行えます。
また、MRC01には産業界で一般的なEtherNet/IPに対応しているため、上位コントローラと接続して制御することができます。
EtherNet/IPを使用することでロボットを使用した装置制御の幅は広がります。
今回のお役立ち情報ではEtherNet/IPを使用した5つの使い方について実機を使って、タッチパネルを使用した例をご紹介します。
・運転プログラムの選択と起動
・運転プログラムの目標位置変更(ポイントデータを変更する)
・運転プログラムの目標位置変更(値を直接変更する)
・運転プログラムの目標位置変更(値をカメラ座標で変更する)
・運転プログラムを組まず直接制御
\ロボットコントローラの資料はコチラ/ \グリッパやカメラを含むシステムの価格など/


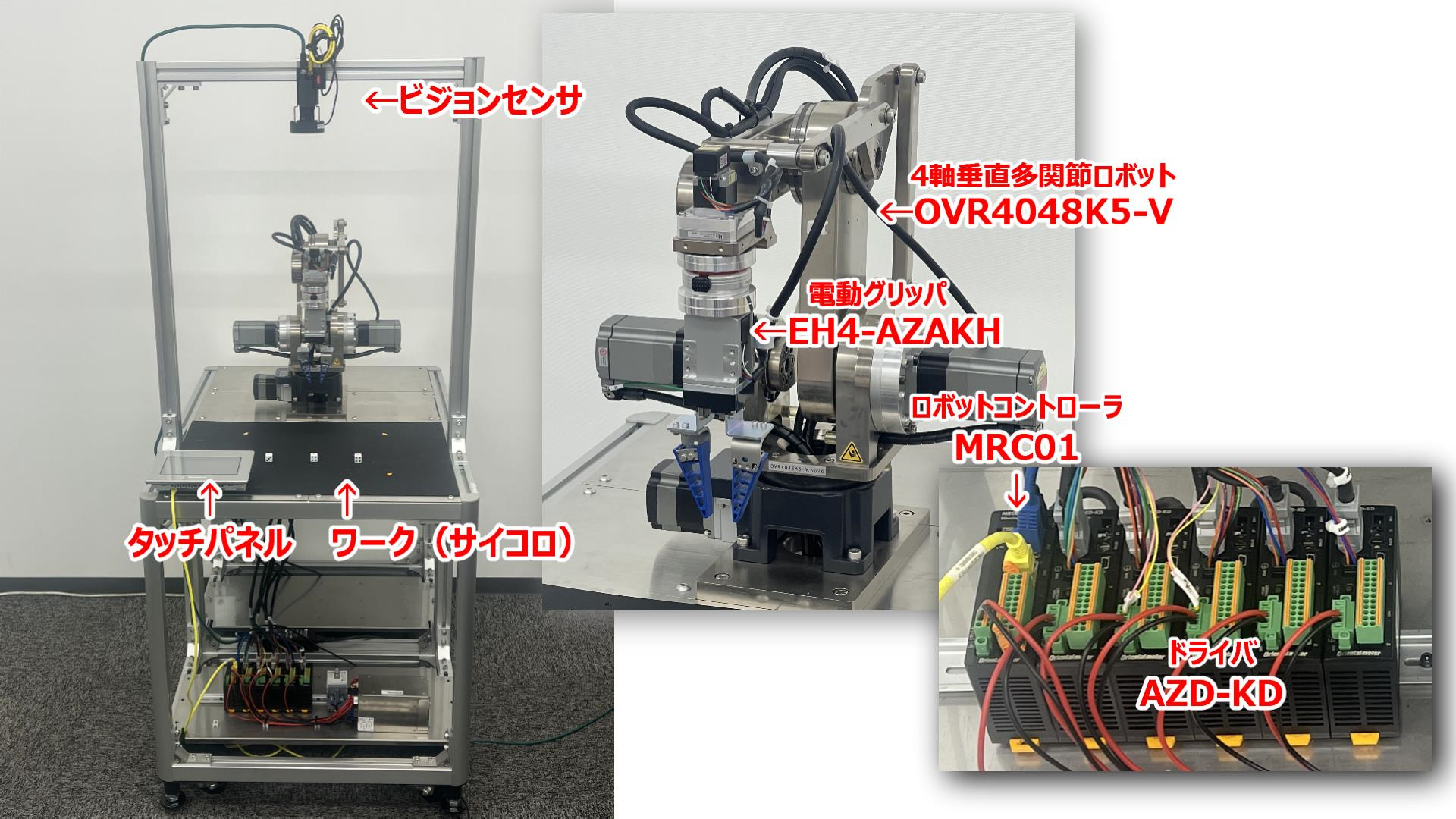
1)実験に使用するロボット構成
EtherNet/IPで使用する上位はPLC・パソコン・ワンボードコンピュータ・タッチパネル等があります。
今回はタッチパネルを使用した例をご紹介します。
2)実際に動かしてみた
以下のようにEtherNet/IPを活用した5つの方法について、実機を使ってご紹介します。
※ロボットのセットアップからプログラム作成までの手順については
お役立ち情報No.31「15分で動かせる! ロボットコントローラMRC01と小型ロボットOVRでセットアップをやってみた!」
でご確認ください。
ロボットコントローラMRC01と組み合わせできるロボット
ロボットコントローラMRC01は、小型ロボット OVRのほか、
AZシリーズおよびAZシリーズを搭載した電動アクチュエータと組み合わせることができます。

ロボットで実現したいことはお決まりですか? 気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
