No.32 カメラを使ったロボット制御は難しくない! ロボットコントローラMRC01でキャリブレーション、プログラムにトライ
カメラを使ったロボット制御は難しくない!
ロボットコントローラMRC01でキャリブレーション、プログラムにトライ

ロボットにカメラを搭載してワークを判別して搬送するという使い方はよくあります。
その際に使用するカメラは「ビジョンセンサ」と呼ばれる特殊なカメラです。
ロボットと組み合わせて使用する場合、「キャリブレーション」という機能が必要ですが、カメラにその機能が搭載されているものとされていないものがあります。
この機能がついているカメラは高機能でコストも高くなる傾向にあります。
ロボットコントローラMRC01ではキャリブレーションの機能が搭載されているため、カメラでのキャリブレーションは不要です。
そのため、キャリブレーションの機能がついていない安価なカメラも選定することができ、装置全体のコストダウンにもつながります。
今回のお役立ち情報ではロボットコントローラMRC01でのカメラを使った設定とプログラムについて説明していきます。
OVR4048K5-Vのほか、OVR5035K1-V、OVR4088K5-Vを使用した実機体験セミナーを開催しています(詳細はこちら>>>)
\ロボットアームの総合カタログはコチラ/ \グリッパやカメラを含むシステムの価格など/


はじめに
ビジョンセンサとカメラの違い
カメラでワークを検出する、というときに使用するカメラは一般的なカメラではありません。
ビジョンセンサといい、撮影した対象物の座標や向きを検出できる機能が搭載しているものが必要です。
(ビジョンセンサはカメラと画像処理機器で構成されています)
また、カメラ専用ソフトを使用してワークの形を登録しておくことが必要です。
※今回の実験ではあらかじめワークの形状登録をしてあります。
※カメラ用ソフトでの形状登録については説明は省きます。
ビジョンセンサ使用時に行う「キャリブレーション」とは
これからセットアップを行いますが、その際にやるのが「ロボットビジョンキャリブレーション」という設定です。
(以降キャリブレーションで略)
カメラとロボットですが、
・カメラの位置とロボットの位置は離れている
・カメラの座標系(ピクセル単位)とロボットの座標系(mm単位)の単位が合わない
これを、動かしながらカメラとロボットの位置を推定し、カメラの座標系をロボットの座標系に変換する設定をキャリブレーションといいます。
カメラにはこの機能が搭載されているものとされていないものがあります。
MRC01にはキャリブレーションの機能が搭載されているため、カメラにキャリブレーション機能が搭載していないタイプでも使用することができます。
今回の実験ではMRC01でのキャリブレーション設定をご紹介します。
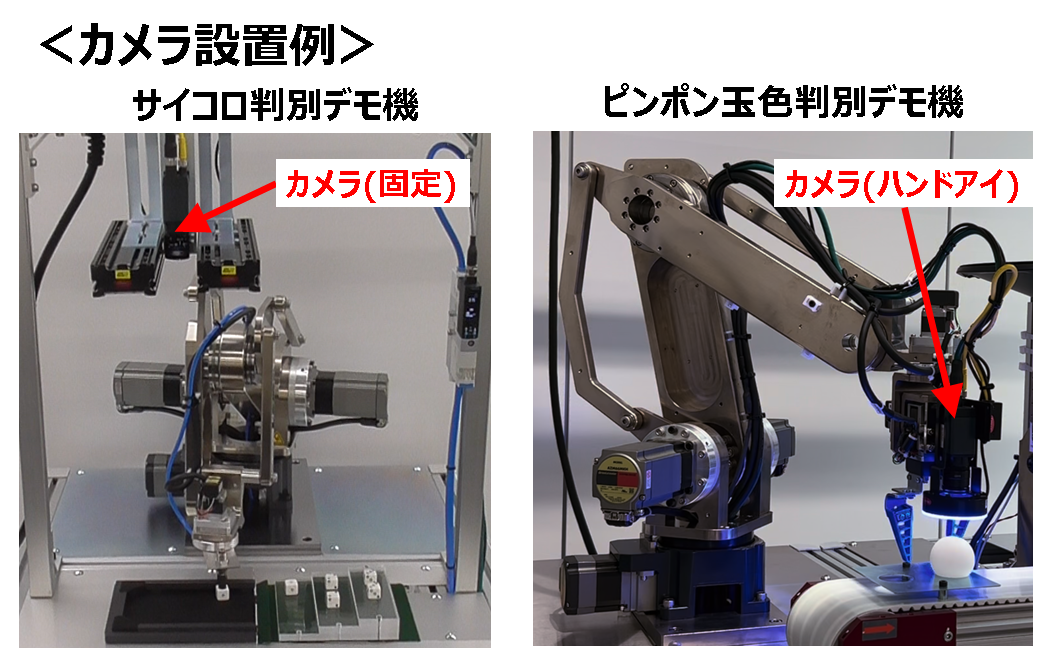
また、キャリブレーションの方法はカメラの設置位置でかわります。
・カメラは固定設置
・カメラはロボットアームの先に設置(ハンドアイ)
今回は後者のカメラをロボットアームの先に設置したハンドアイでのキャリブレーションの手順について説明します。
※使用するカメラはキャリブレーション機能が搭載されていますが、今回のキャリブレーションはMRC01で設定します。
システム構成(上位コントローラ必須)
カメラの情報をロボットコントローラに転送するにはシステムの中に上位コントローラが必要です。
カメラの情報はいったん上位コントローラが吸い上げ、それをロボットコントローラに転送します。
従来のロボットビジョンシステムは以下の構成になります。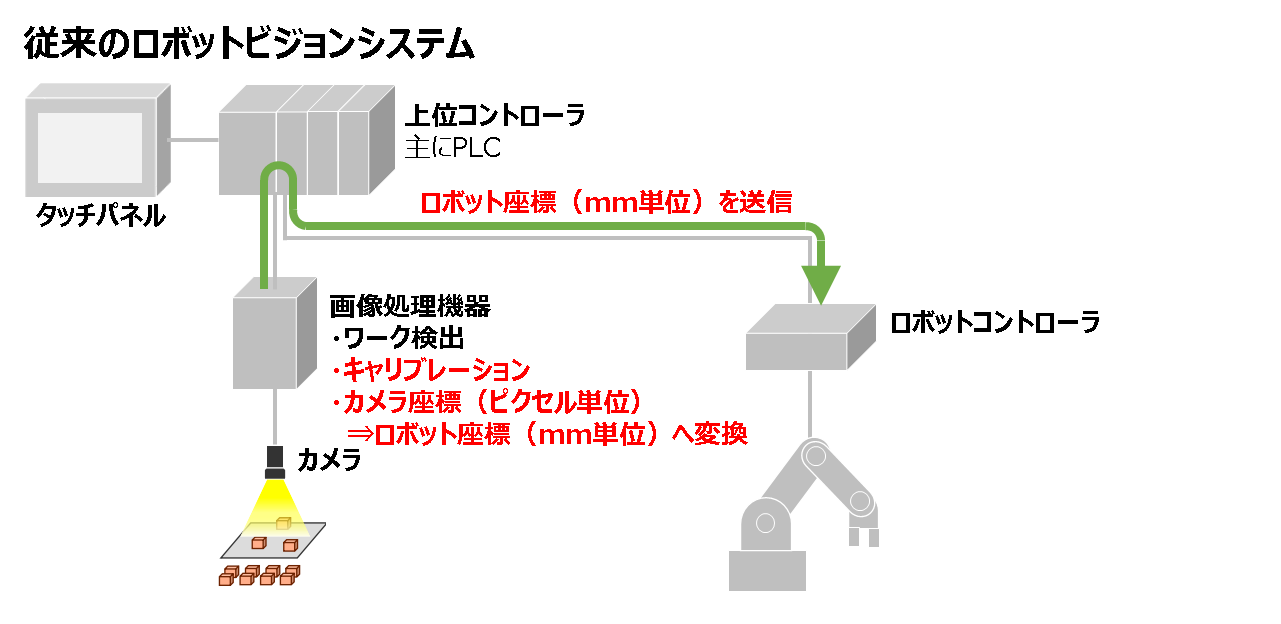
これをMRC01を使用した場合のロボットビジョンシステムは以下のようになります。
画像処理機器にキャリブレーション機能がないタイプは多くあります。
そういったタイプの場合、MRC01を使用すればキャリブレーションが行えます。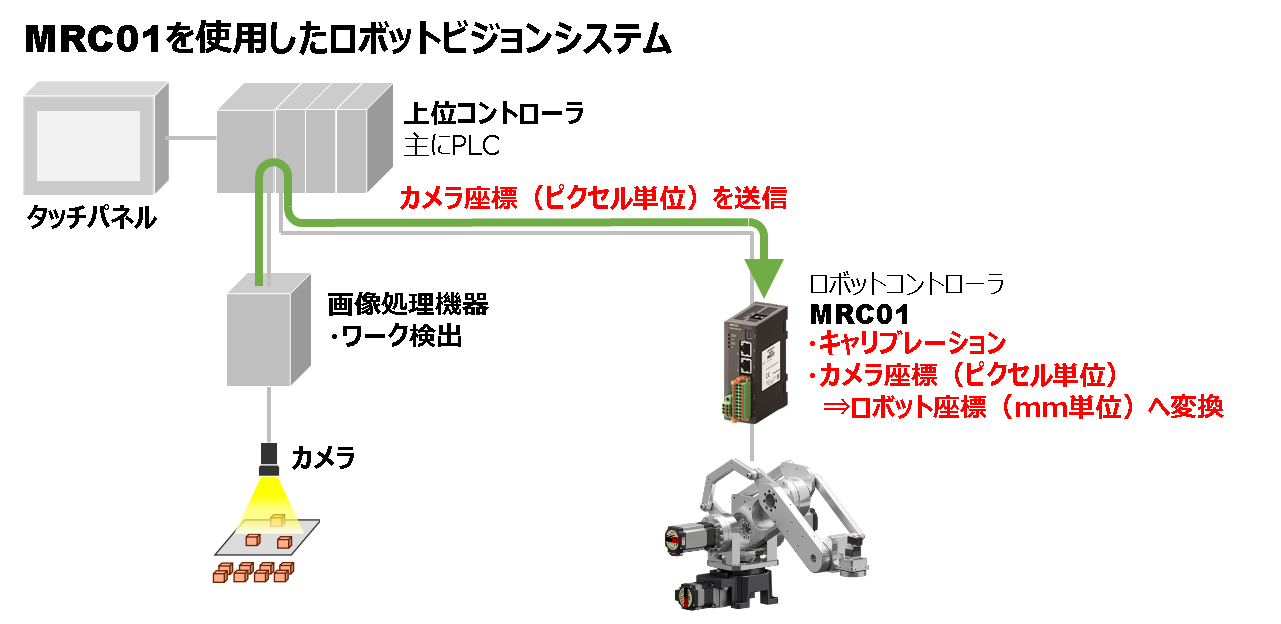
今回の実験では上位コントローラとしてプログラム機能搭載タッチパネルを使用します。
システム構成は以下のようになります。
PLCを使っていないのでシステムとしてはすっきりしています。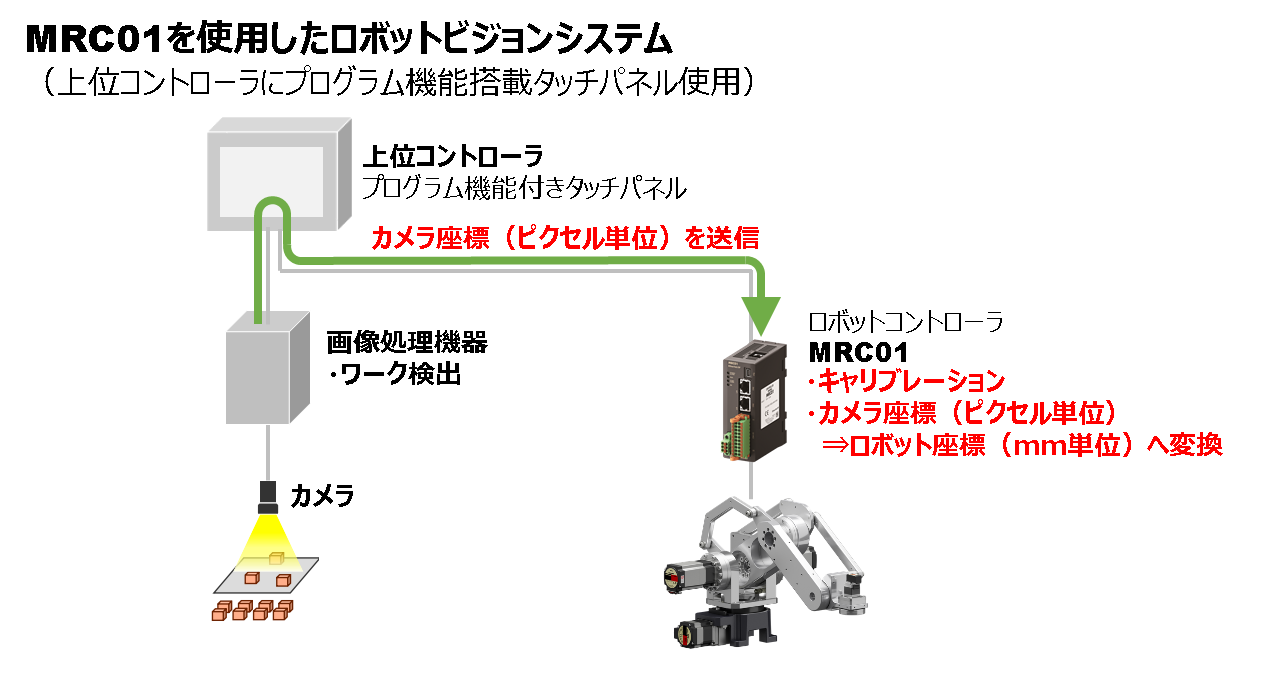
※オリムベクスタではタッチパネルの画面作成のセットアップサポートを行っています。
「キャリブレーション」と「プログラム」のレビュー
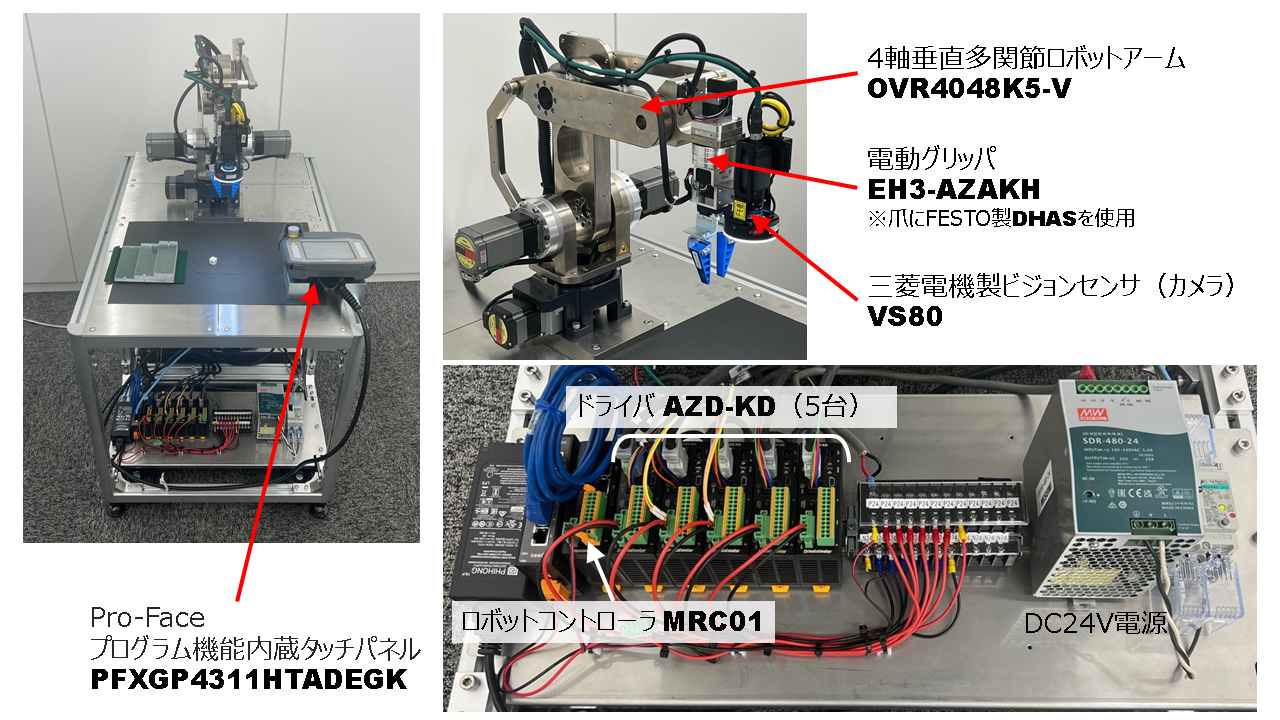
レビュー時のシステム構成
実際にやってみた
カメラの座標とロボットの座標を合わせるためキャリブレーションを行います。
キャリブレーションの設定動画をご覧ください。
また、キャリブレーションが終わったけど、カメラの位置情報を活用してロボットを動かすにはどうすればいいのか。
MRC Studioのプログラムではカメラの位置情報を使った位置決めができるコマンドがあります。
このコマンドを使ったプログラムも動画ありますのでご覧ください。
※MRC01を使用するには専用ソフト「MRC Studio」が必要です。(ダウンロードはこちら)
| 項目 | 再生時間 | 動画 |
| キャリブレーション | 9:14 | |
| プログラム | 6:18 |