No.14 驚異のスピード!カム機構で実現、繰返し動作の高速・高精度搬送
-
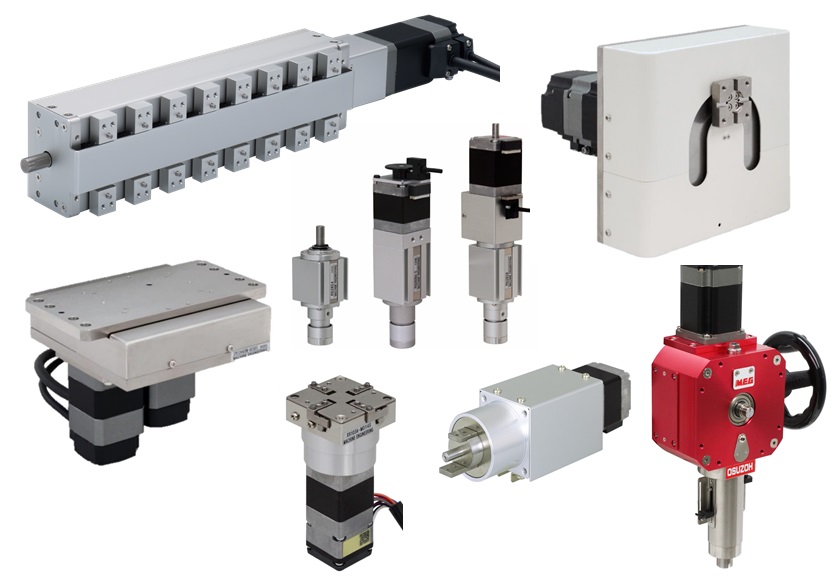
株式会社マシンエンジニアリングのカム機構商品と、
オリエンタルモーターのαSTEP(アルファステップ) AZシリーズを組み合わせた商品のご紹介です。◆カム機構のメリット◆
カム機構はカムに作られた溝に沿って動作するため、再現性があります。
カムはその溝加工を工夫することで停止時の振動を減少させたり、滑らかに搬送させたりと自在な動きが可能です。
このカム機構の駆動源にステッピングモータの俊敏な立ち上がり動作と、超低速から中速域まで高トルクが 保たれるため、短サイクルを一瞬にして駆動させることができます。基本的なカムの動き⋙
オリエンタルモーター αステップAZシリーズとの組み合わせ

- 上下・左右・開閉・反転の動作をカム駆動で実現させる機構商品とオリエンタルモーターのαSTEP(アルファステップ) AZシリーズを組み合わせた商品をご紹介します。
好評をいただいているAZシリーズは、指令位置に対して実際のローター回転位置の偏差(遅れ/進み)を偏差カウンタで演算し、演算結果から「過負荷領域」を判別することで、オープンモード/クローズドモードの制御を切り替えて、位置・速度を、監視・補正する信頼性の高いモータです。
また、バッテリーレス アブソリュートエンコーダを搭載→バッテリー交換は不要で、 任意に機械原点を設定できますので原点センサも不要になります。パルス列・位置決め機能内蔵ドライバや各種ネットワーク対応ドライバを選択し、上位のコントローラに合わせてお選びください。 またドライバ機能に、コンポジット出力機能があります。これはワークが任意の座標に到達しているという信頼性のもと、動作完了信号(END出力)よりも早いタイミングで信号を出せるので、搬送動作終了と同時にワークを取り上げるプログラムにするとタクトタイム短縮が可能です。
カム機構商品ラインアップ

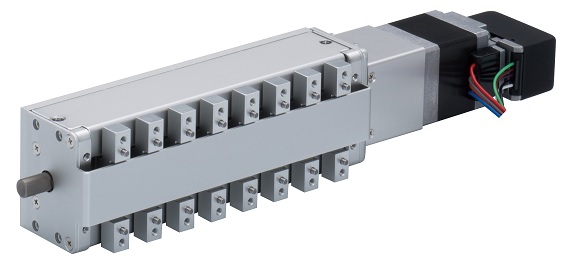
PIU ピックアップユニット(上下運動)
-

-
ピックアップ動作 最速30ms
円筒の溝カムを回転させて上下の動きを作ります。高速でもスムーズでなめらかな動きが実現できます。
溝カムの曲線が上昇端と下降端では緩やかなためエアシリンダと比較しショックレスで移動終端のたわみを抑えます。
カムの溝を工夫して作ることより、ワークの搬送を自在に操ります。
1 回転で下降→停留→上昇→停留を内蔵のメカ機構でおこないます。
動作確認センサも取り付けられ、簡単制御を実現します。
ピックアップの上下作動 超高速 30ms/cycle 時 45dBと静かな事務所の中と同じ程度です。
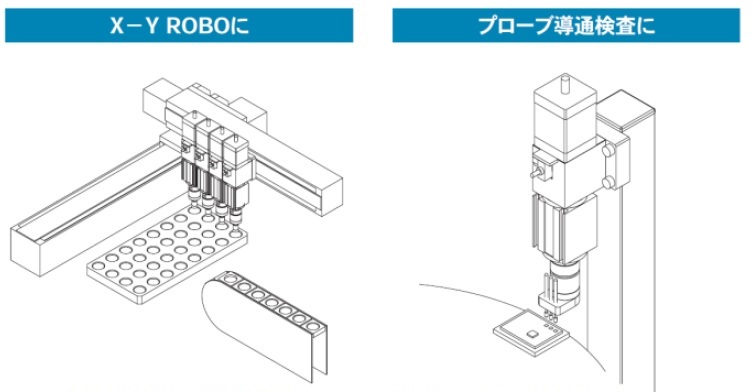
エアーで吸着させて部品を移載する、部品の耐久試験、電子部品、プローブの導通検査に高速作業ができて最適です。
-
-
2サイズから選べます。本体はαステップARシリーズが搭載されていますが、AZシリーズへの変更は可能です。形式 本体サイズ(mm) 基準ストローク(mm) PIU28☐DM24 ☐28 4/8/12/16/20 PIU42☐DM46 ☐42 12/20 PCU ピッチチェンジャー
-
ワークのピッチ変更作業や多数個搬送に最適
単純な2点間のピッチ変更で、複数の溝付プレートをエアシリンダで上下させ、溝に沿ってスライドプレートを開閉させる。
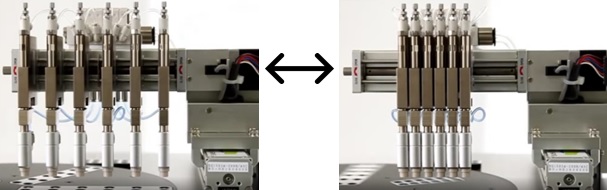
これからは、入力軸を回せば、内蔵のカムが回転してスライダを等ピッチで移動させることができ、任意の位置でご使用いただけます。本体幅40mmサイズは手に載る極小!!(右写真)最小ピッチ8mmからお使い戴けます。
入力軸を回せば、スライダは常に同じピッチで開閉します。パルス制御モータをお使いになればポイントの位置調整が簡単に、多点使用が可能です。本体幅70mmは、幅70×高56×全長200mm~。製品質量はわずか1.6kg~で軽量コンパクトなシステムを実現します。入力軸を360°以内で往復制御するだけの動作が高速移動を実現します。豊富な種類の連数からお選びください。PIU(ピックアップユニット)をヘッドに搭載して高速高精度な搬送ができます。形式 本体長さ(mm) 幅(mm) 連数 2 3 4 5 6 7 8 9 PCS08040☐-Z24AK 80 40 〇 〇 〇 〇 PCS12040☐-Z24AK 120 40 〇 〇 〇 〇 PCS20070☐-Z48AK 200 70 〇 〇 〇 〇 PCS26070☐-Z48AK 260 70 〇 〇 〇 〇 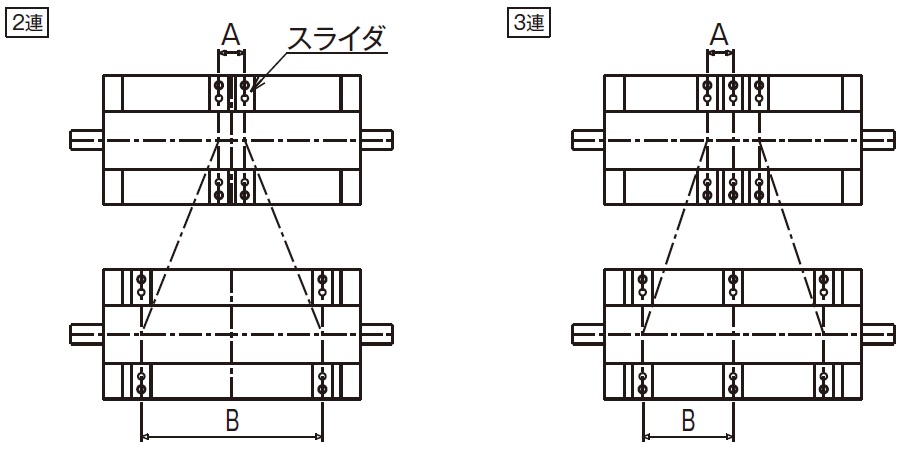
連数によるピッチA, Bの資料はこちらで確認ください(カタログp.8)→

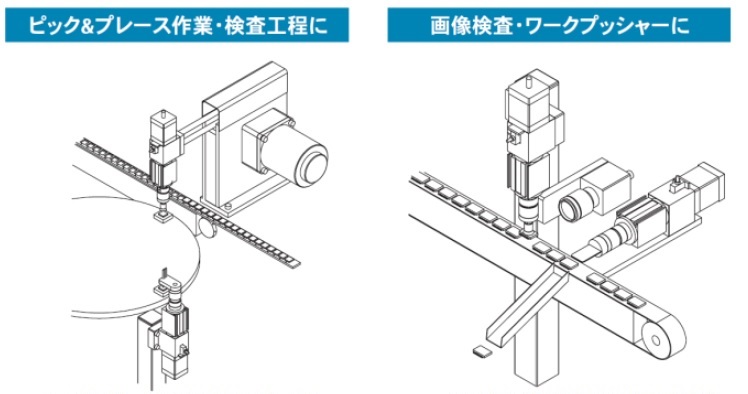
PPU ピック&プレースユニット(左右運動)

-
サイクルタイム0.2sec 台からの高速安定搬送を実現
1 モータで左右・上下を駆動。
前後ストロークは30 ~ 130mm まで9 種類。サイズは小型・中型・高可搬。豊富な機種から選べます。
本体下部をアームが移動するのでアームの周囲が自由に使えます。Z 軸ストロークは自由に設定できます。
単軸ロボット構成のものと消費電力比較で大幅省エネ。シンプルメカで長寿命なユニットです。
フロントヘッドモデルは、アーム取出し方向の自由 設計を実現しました。スライドガイドは、X 軸・Z 軸とも2 列構成で、剛性アップしました。従来品の高可搬タイプは最大搬送質量0.5kgに対し、フロントヘッドは2kgまで搬送可能です。
WEBショップで

■動作範囲
タイプ X(mm) Z(mm) 繰返し位置決め精度 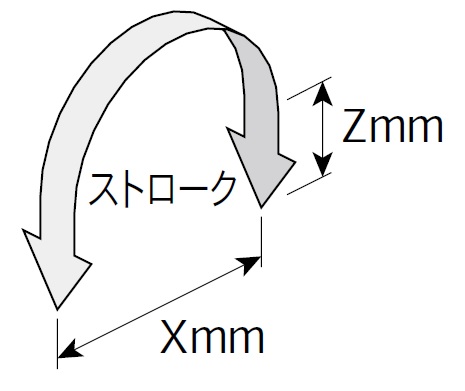
X6306FWS-Z66☐ 60 0~21 ±0.02 X6307FWS-Z66☐ 70 0~24 X6308FWS-Z66☐ 80 0~30 X6309FWS-Z66☐ 90 0~32 X6310FWS-Z66☐ 100 0~36 X6311FWS-Z66☐ 110 0~40 X6312FWS-Z66☐ 120 0~42 X6313FWS-Z66☐ 130 0~46 CPS カムポジショニングステージ

-
わずか0.1secで位置補正させる!
高速X-Y位置補正ステージボールネジではスピードが遅い…そのお悩みを カムの「高速送り」で解決します。
画像検査での位置補正に最適!溝カムを使って、X軸、Y軸それぞれを位置制御させます。ノンスリップスライドウェイを採用しタクトの早い用途にも確実に移動。バッテリーレスアブソリュートエンコーダ搭載のαステップAZシリーズで確実に位置補正を行います。
ストローク±2.7mm(X、Y軸とも)最大積載重量5.4kg、繰り返し位置決め±0.01mm
-
CPSカムポジショニングステージで位置補正を行い、PIUピックアップユニットで部品をつかみ、PPUで整列させる。この動作をカムの速さで行うことでタクトタイム短縮につながります。

TOU 表裏反転ユニット
-
わずか0.1秒で微細部品をひっくりかえす!
単純な表裏反転を簡単な制御でおこなうことを目的に開発した製品です。反転に必要な動作を1 モータでおこなうメカニズム。
使いやすい反転ユニットです。TOU反転ユニットは高速であっても正確な反転がおこなえる独自の方式です。位置繰り返し精度の高いカム機構をベースに応答性に優れ頻繁な起動・停止が可能なステッピング駆動で実現します。
ステッピングモータで180°回すだけで表裏反転を、わずか0.1秒で実現します。制御もシンプル!取り扱いやすいユニットです。
スライダは無限軌道型リニアガイドで軽快、無理な力が加わらず、カム機構も長年の実績のあるメカニズムであり長寿命ユニットです。
形式 ストローク(mm) 8 16 32 48 X641☐―☐Z46AK 〇 〇 〇 〇 X641☐ーZ66AK 〇 〇 ALIGNMENT アライメントユニット(開閉運動)

-
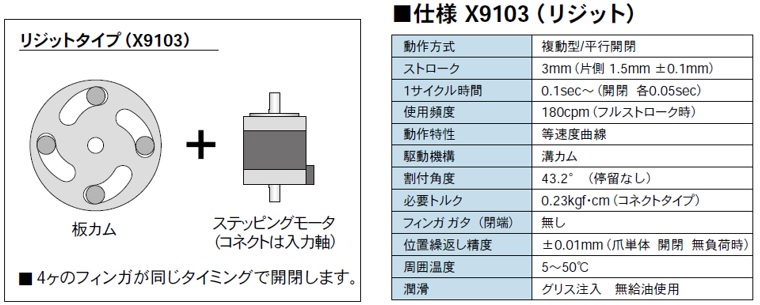
1サイクル0.1秒の高速・高精度位置決めが可能
狭い空間でも高精度な位置決めを発揮できる位置決めユニットを、と開発した小型のアライメントユニットです。
ボディの幅を抑えた苦心の設計。小ストローク搬送の狭い空間であっても正確なワークの位置決めを実現します。
繰り返し精度の高いカムをベースに、リジットはバックラッシレス機構を採用。バッファはスプリングによるセンタリングバッファ機能で高精度な位置決めができます。シンプルでフィンガ駆動部に過負荷を与えない構造のため耐久性に優れ、長期にわたって使用できる経済性の高いアライメントユニットです。無限軌道リニアガイドの採用により、軽快で、こじれのない作動を実現。高速応答性に優れています。ステッピングモータの加減速制御により高速でもソフトな位置決めを実現します。
1 サイクル0.1sec(フルストローク)の応答スピードで位置決めができます。本体にM5 ポート穴を設けてあり、ドライエア をブローすることで、本体上部角穴からの異物侵入を防止します。
リジットタイプ(X9103A-MO14S) αステップARシリーズが搭載されていますが、AZシリーズへの変更は可能です。
バッファタイプ(X9113A-MO14S) αステップARシリーズが搭載されていますが、AZシリーズへの変更は可能です。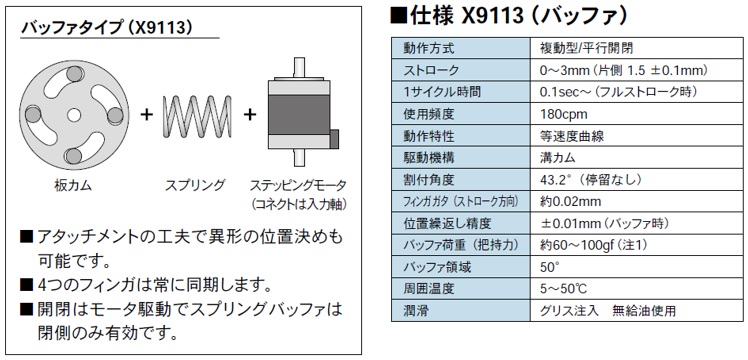
POS カムプッシャー (押しつけ運動)

-
ボールねじよりも速く、エアよりも強いプレス動作
装置を製作する中で、圧入や切断、曲げなどの押付け作業に対しサイクルタイムが間に合わない、ユニットが大きすぎる、エア圧が変動し繰り返し安定性が得られないなどを解消。POSカムプッシャーはカムとステッピングの技術を融合させ、高速ワークアプローチと力強く押付ける動作を、モータを一定回転させるだけの簡単制御で実現します。さらに手動運転もでき利便性が向上します。
手動ハンドルで、お試し運転から使えてヘッドの芯合わせやツールの確認が迅速にできます。ラック式ハンドプレスに比べ、カムで動作のバラツキを抑えて安定性に優れた作業を実現します。モータを回せばカムが加速度をコントロール。
所定の位置まで高速でアプローチし、速度を落とし押付け領域(定ピッチ領域)に入り高推力で加圧します。オプションで金型を持ち上げるバックアップユニットやカム軸に取り付けるフォトセンサ&ドグを用意しています。型式 ストローク 定格荷重 繰返し精度 POS08020DM-G☐Z48AC 20 2000 ±0.015 POS13030DM-G☐Z69AC 30 3000 ±0.015 エスケープメント
-
連続的に流れてくるワークピースの分離が簡単にできます
組み付けるワークピースを正しく分離し位置を決めることから自動組立は始まると言われます。組み付けの準備を行う分離・位置決め工程はややもすると疎かにされやすい作業内容ですが、自動組立の基本はこの要素技術を確立しなければなりません。それは正確な分離が、自動組立システムの信頼性を生みだす基本となるからです。 一般的には2つのシリンダを用いたり、リンクの活用により分離作業をおこなう例が多く見られますが、そうした方法は信頼性に乏しいだけでなく、コストもかかります。マシンエンジニアリングは、ワンアクション・メカニカル駆動で分離の確実性と高い保持力を実現し、この問題を根本的に解決いたしました。それがここに紹介するエスケープメントです。 自動組立システムやコンポーネントの設計製作に安心してお使いいただけるMEGのESCAPMENTをご利用ください。
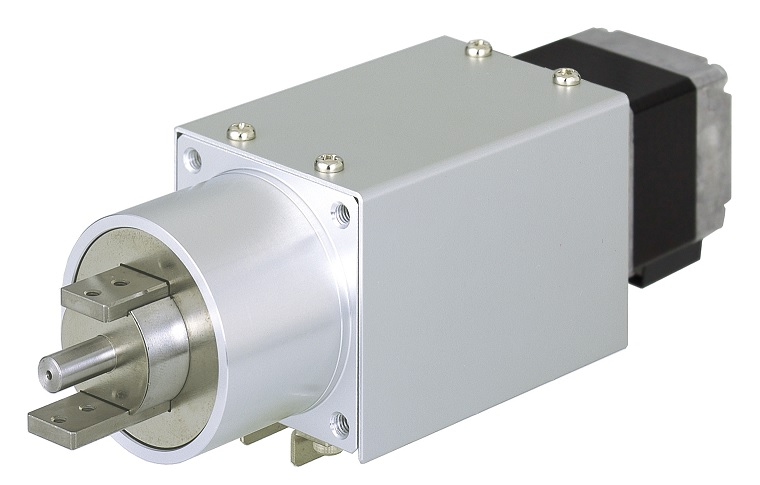
カタログはコチラ→構造
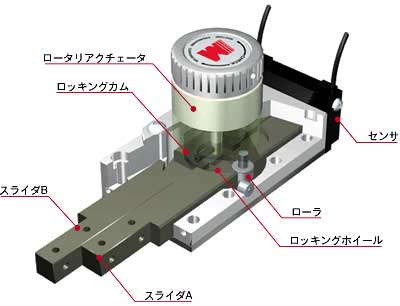
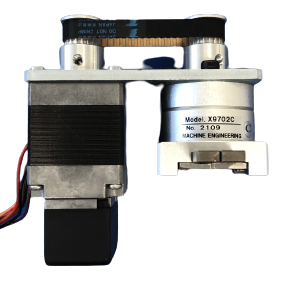
従来のエスケープメントは、2本のシリンダやリンクによる形式が主体でしたが、ここにご紹介する《ESCAPEMENT》は、 たった1つのロータリアクチェータで2本のフィンガを作動する新しい方式です。 フィンガは、内部に組み込まれたローラとロック用カムによって駆動される摺動式ですから、 シリンダの直接使用やリンク式に較べ、強いストッパ保持能力を得ることができるのが大きな特長です。X9702Cは外部入力モデルで、モータによる駆動が可能です(写真はAZM24AKと組み合わせた例です)。
用途例
ハーツフィーダ・ベルトコンベア シュート フリーフローコンベア トレーピッチフィード
-



