No.05 採用事例:ワーク供給・排出の自動化 オリエンタルモーター株式会社
- 4軸垂直多関節ロボット・プログラムサポート採用事例
ロボットの導入により
ワークの供給・排出の自動化を実現 - ■装置 ステータコア加圧自動機
■採用製品 ロボットコントローラ MRC01
小型ロボットOVR 4軸垂直多関節
\ロボットの総合カタログはコチラ/ \事例の詳細・システムの価格など/

課題:手作業を自動化したい
- モータ部品のひとつであるステータコアは、何枚もの鉄板が積み重なっている。
- 鉄板間に隙間があると塗装ムラの原因になるため、隙間を埋めるためにプレス加工後に再加圧する必要がある。
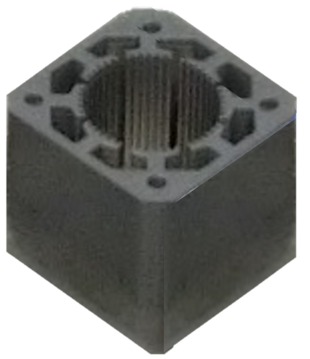 ステータコア |
- 加圧装置へのワークの供給、加圧、検査、排出はすべて人がつきっきりで行なっていた。
省人化を目的に、加圧工程を自動化する装置を検討した。

ワークの供給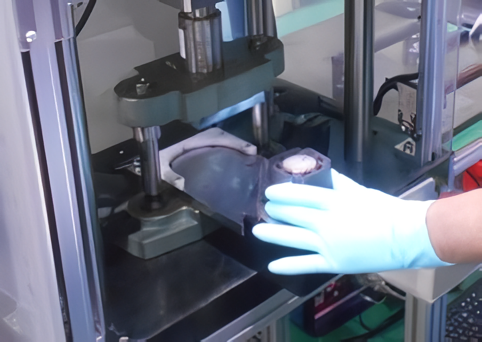
加圧・検査
ワークの箱詰め
-
解決策:ワークの供給・排出工程を1つの装置に
- ロボットコントローラMRC01、4軸垂直多関節ロボットを使用し、ワークの供給、排出を自動化。
ワークをコンベアに配置しロボットでワークを加圧装置へ供給、排出。
加圧後のワークは自動で検査を行ない、OK判定のワークはもう1台のロボットでバケットに整列。
また、自動のバケット交換装置を取り入れることで長時間の連続運転を可能にした。
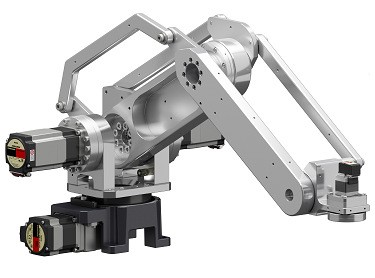
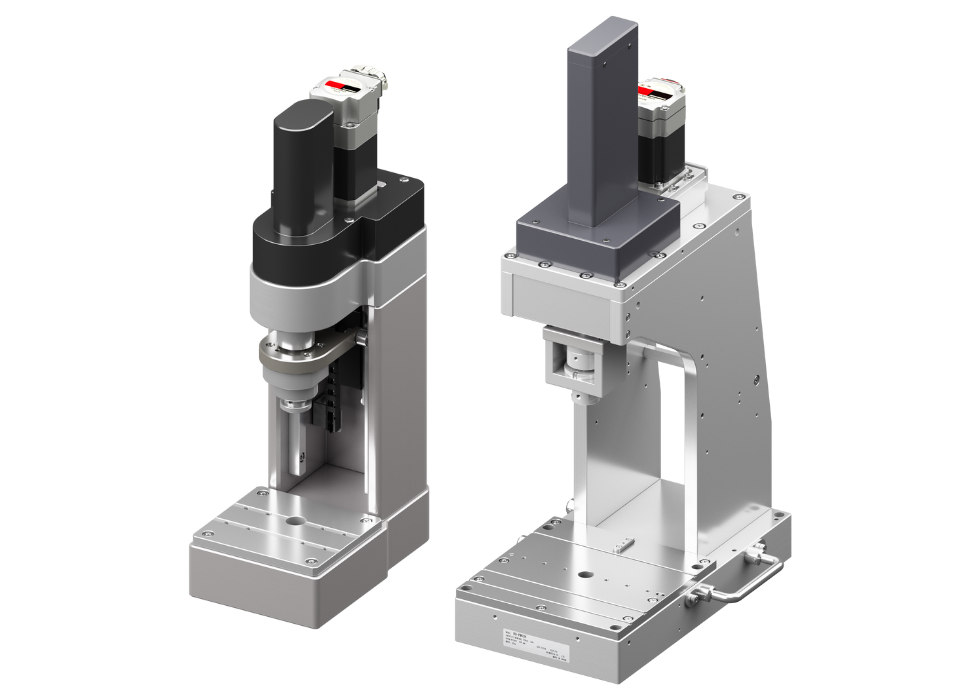
- 小型ロボットOVR 4軸垂直多関節 OVR4068K5-V
平行リンク機構を採用した4軸垂直多関節ロボット。
・軸数:4軸
・可搬質量:5kg
・最大リーチ(水平):729mm(垂直)、680mm(水平)
・繰り返し位置決め精度:±0.05mm
・DC24V駆動
※排出の工程に採用している製品は旧型式のOVR680K5です。
最新製品は写真のOVR4068K5-Vになります。
詳しくはコチラをご覧ください⋙ 
- ロボットコントローラMRC01
「初期設定」「動作プログラミング」「動作確認」の3ステップで、自作ロボットを簡単に導入・制御できるロボットコントローラ。
専用プログラミングソフトMRC Studioは無料でダウンロード可能。
ラダープログラムなどの専門知識がなくても、直感的にプログラムを入力。
制御方法:EtherNet/IP通信、I/O
対応製品:小型ロボットOVR、AZシリーズを搭載した自作ロボット
詳しくはコチラをご覧ください⋙
\採用ロボットのカタログはコチラ/ \事例の詳細・システムの価格など/
採用ポイント:ロボットコントローラMRC01の操作性・汎用性
ロボットコントローラMRC01との組み合わせによる簡単操作・汎用性の高さが魅力
制御面は、プログラム作成が簡単にできるロボットコントローラMRC01を採用。
別工程でMRC01を使用した経験があり、同じ操作感で早期に設備立上げ可能な点が決め手だった。
またMRC01の習得ができれば、小型ロボットOVRのどのタイプも同様の手順で動かすことができる。
今後も設備の自動化を進めていくため、操作習得・教育にパワーをかけず
様々なタイプのロボットを使うことが出来る、汎用性が高い点もメリットだった。
ロボット導入後のメンテナンス性
”メンテナンス性”もポイントだった。ステータは多くの製品に使用している部品なのでラインを止められない。
一般的な産業用ロボットは、故障した場合にメーカーや保守専門業者へ依頼が必要。
そのため、復旧まで数日かかるのが一般的だが、小型ロボットOVRは一部のモータ、部品が自社で交換可能。
保守契約費用も不要なため維持コストも低減でき、トータルコスト削減にも繋がる。 
※当社でも保守・メンテナンス時のモーター交換をおこなっています。 こちらまでお問い合わせください。
導入効果:作業者が1人→0人へ
作業人数:1人→0人
加圧時間が短い分、着脱作業の頻度が高いため、1人の人員が付きっきりで作業する必要があった。
装置の導入によって長時間の無人運転が可能となり、他の機械を受け持つ人が合間の時間でワークをセットすることで選任の作業者が不要となった。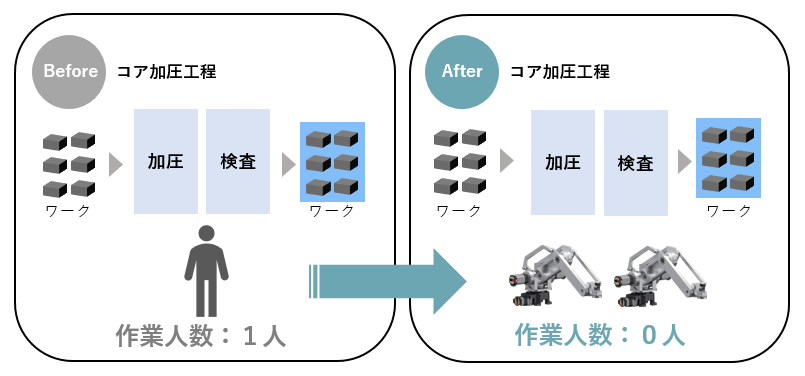
ロボット故障停止から復旧までの時間短縮
小型ロボットOVRは一部のモータ、部品が自社で交換可能なため、ロボットが故障停止してから復旧までの時間を短縮できる。
実際、装置立上げ時アーム先端を誤って破損させてしまったが、部品をすぐに入手し翌日には復旧できた。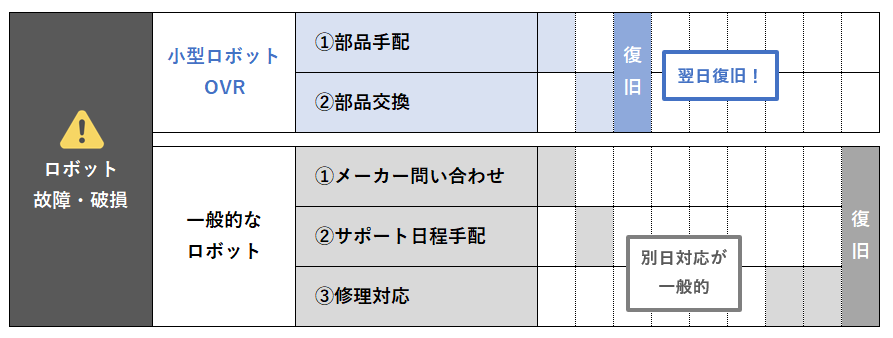
※当社でも保守・メンテナンス時のモーター交換をおこなっています。 こちらまでお問い合わせください。
採用製品
関連製品
- ハンドプレス作業の改善に!プッシュメカ
ハンドプレスによる手作業でお困りの工程はございませんか?
電動プッシュメカは手作業による作業者の負担軽減、生産性向上、属人化の解消に貢献します。
●加圧能力 1kN(約100kg)・3kN(約300kg)
●コンパクト設計
●電源入力はAC・DC に対応
●BDコントローラとの組み合わせで、手間をかけずにカンタン導入
詳しくはコチラをご覧ください⋙
関連サービス
自動化支援サービス
自動化装置を導入したいけど、ちょうどいい装置がない、自社ではなかなか手を付けられない…というお悩みをサポート。
「手作業の繰り返しを自動化」をコンセプトに、お客様のラインに適したリーズナブルな装置をご提案いたします。
詳しくはこちら>>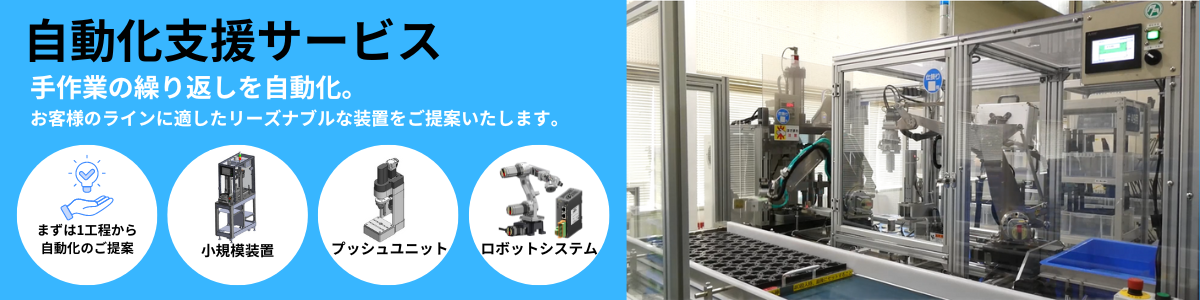
セットアップサポート
ロボットや小規模装置の立ち上げ・導入を自社で考えているお客様に対してはじめの一歩をサポートします。
導入時のプログラムサポート等、「最初のきっかけさえわかれば先に進める」を後押し。業務の負担軽減・時短に貢献します。
詳しくはこちら>>
製品選定段階から装置設計をサポートいたします! お気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
