オリエンタルモーターステッピングモーターの原理と構造
ステッピングモータの原理と構造
ステッピングモータの断面図を下図に示します。 ステッピングモータは大きく分けてステータ(固定子)とロータ(回転子)の 2つの部品から構成されています。 ロータはロータ 1、ロータ 2、永久磁石の3つから構成されています。また、ロータは軸方向に磁化されており、ロータ 1がN極の場合、ロータ 2がS極となります。
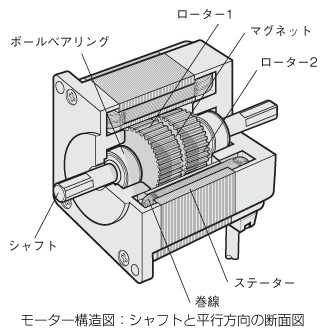
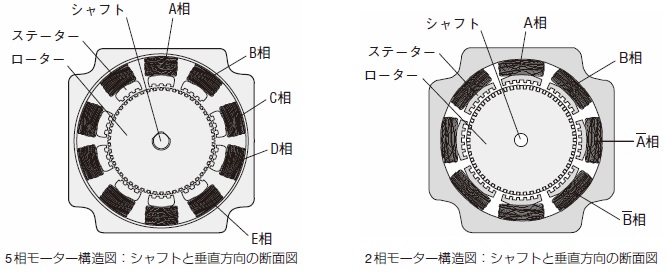
ステータには小歯を持つ磁極があり、それぞれに巻線されています。 その巻線は向かい合った磁極でつながっており、電流を流すと同じ極性に磁化されるように巻線されています。(ある巻線に電流を流すことにより、向かい合った磁極でN極またはS極というように同極に磁化されるということです。) 向かい合った 2つの磁極で 1つの相を形成しています。A相からE相までの5つの相があるタイプが5相ステッピングモータ、A相とB相の 2つの相があるタイプが 2相ステッピングモータと呼ばれています。 ロータの外周には50枚の小歯があり、ロータ 1とロータ 2の小歯は 1/ 2ピッチ機械的にずれて構成されています。
励磁:モーターの巻線に電流を流した状態のこと
磁極:励磁することによって電磁石化するステータの突出部のこと
小歯:ロータやステータの歯のこと
■慣性負荷―自起動周波数特性
自起動周波数の慣性負荷による変化を表した特性です。ステッピングモータのロータ自身や負荷には、慣性モーメントがあるため、瞬時起動時、停止時に遅れや進みがモーター軸に生じます。この値はパルス速度によって変わってきますが、ある値を超えるとモーターはパルス速度に追従できなくなり、脱調(ミスステップ)してしまいます。 この脱調する寸前のパルス速度を自起動周波数といいます。
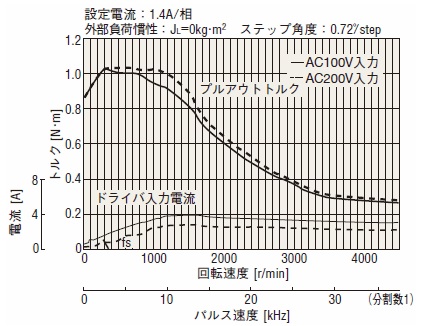
■回転速度―トルク特性
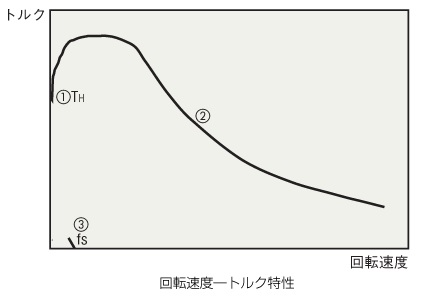
ステッピングモータを駆動したときの回転速度とトルクの関係を表した特性図です。 ステッピングモータの選定時に必ず使用する特性です。横軸はモーター出力軸の回転速度を、縦軸はトルクを表しています。 回転速度―トルク特性はモーターとドライバによって決まり、使用ドライバの種類によって大きく異なります。
-
① 励磁最大静止トルク(TH:Holding Torque) ステッピングモータが通電状態(定格電流)で停止しているときに持っている最大の保持トルク(保持力)のことです。
② プルアウトトルク(Pullout Torque) 各回転速度で出すことのできる瞬時最大トルクです。 モーターを選定する場合は必要トルクがこの曲線の内側に入っていなければなりません。
③ 最大自起動周波数(fS) ステッピングモータが摩擦負荷、慣性負荷が0のとき、瞬時(加減速時間なし)に起動、停止できる最大のパルス速度です。 これ以上のパルス速度でモーターを駆動する場合には、徐々に加減速する必要があります。慣性負荷がモーターに付くことによってこの周波数は低下します。 (慣性負荷―自起動周波数特性 参照)
最大応答周波数(fr) ステッピングモータが摩擦負荷、慣性負荷が0のとき、徐々に加減速することにより運転することのできる最大のパルス速度のことです。下図は代表的な5相ステッピングモータユニットの回転速度―トルク特性です。
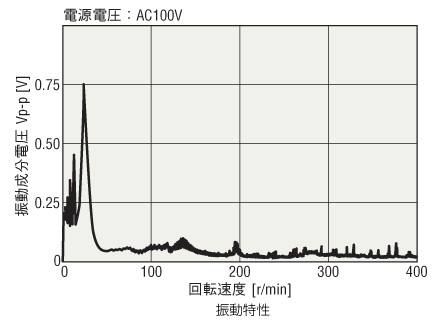
■振動特性
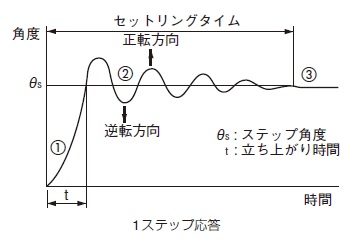
ステッピングモータは連続的なステップ状の動きをしながら回転しています。そのステップ状の動きのひとつを見たものが下の 1ステップ応答です。
-
① 停止状態のステッピングモータに 1パルスを入力すると、次のステップ角度に向かって加速します。
② 加速したモーターはステップ角度を通過し、ある角度をオーバーシュートした後、逆方向に引き戻されます。
③ このように減衰振動した後、所定のステップ角度の位置で停止します。
このような減衰振動を生じるステップ状の動きが低速時の振動の原因です。 ステッピングモータの回転中の振動の大きさを表す特性が振動特性です。 振動レベルが小さいほど滑らかに回転していることになります。
■静特性
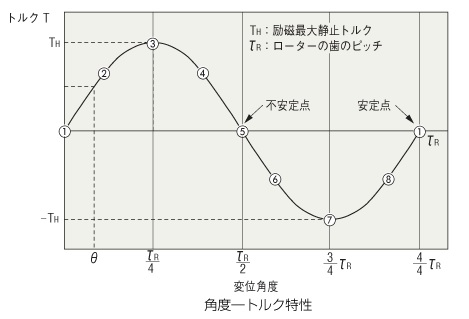
角度―トルク特性 モーターを定格電流で励磁し、モーターシャフトに外部よりトルクを加えロータに角度変化を与えたときの角度とトルクの関係を角度―トルク特性といい、下図のような特性になります。
-
安定点①で釣り合って停止しているとき、モーターシャフトに外力を加えると、安定点①に引き戻そうと左方向にトルクT(+)を発生し、外力と釣り合った角度で停止します。
② さらに外力をかけていくと発生トルクが最大になる角度があります。そのときの発生トルクが励磁最大静止トルクTHです。
③それを超える外力をかけると、不安定点⑤を通り、外力と同方向にトルクT(−)を発生し、次の安定点①まで移動し停止します。
上の特性図の各ポイントでのステータとロータの小歯の位置関係を下図に示します。
ステータとロータの小歯の位置関係
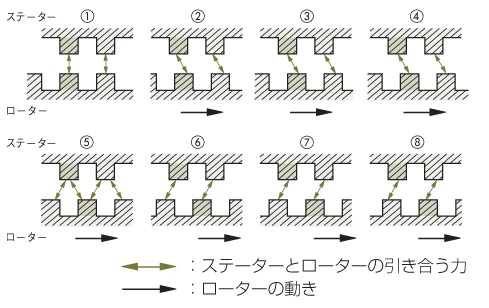
安定点: ステータとロータの小歯が完全に相対した位置で停止している場所のことです。非常に安定しており、外力を0にすると必ずこの場所で停止します。
不安定点: ステータとロータの小歯が 1/ 2ピッチずれた場所のことです。非常に不安定な状態で、外力が少しでも加わると右か左の安定点に移動してしまいます。
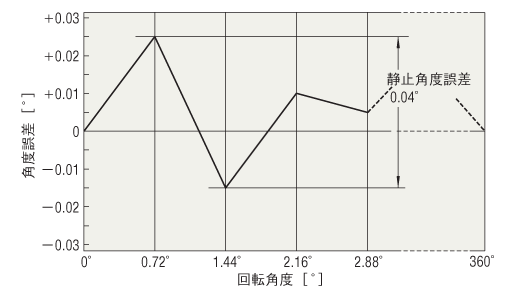
■角度精度 ステッピングモータは無負荷状態で±3分(0.05°)以内の角度精度を持っています。そのわずかな誤差の原因はステータとロータの機械的精度や、ステータ巻線の微小な抵抗のばらつきによるものです。 ステッピングモータの角度精度を表すものとしては次の静止角度誤差が一般的です。
静止角度誤差: ロータの理論上の停止位置と実際の停止位置とのズレのことです。ロータの任意の停止位置を出発点とし、 1 ステップずつ360°測定したときの(+)の最大値と(−)の最大値との幅を表します。 静止角度誤差は±3分以内ですが、これは無負荷条件での値です。 しかし実際の用途においては必ず摩擦負荷が存在します。 その際の角度精度は角度―トルク特性より、摩擦負荷に応じた角度変位を生じます。摩擦負荷が一定の場合、一方向運転のときには変位角度は一定ですが、正逆両方向から運転をおこなうときには往復で 2倍の変位角度を生じます。 停止精度が必要な場合には必ず一方向からの位置決めをおこなってください。