小型ロボット OVR 6軸垂直多関節

-
6軸垂直多関節 OVR6048K1-V
モータ6軸によりあらゆる角度からワークへのアプローチが可能。
アーム駆動部にハーモニックドライブ®を採用し、モータ6軸採用でも12.5kgと軽量化設計。
最大リーチ長は480㎜(水平)、可搬質量は1㎏です。
\ロボットの総合カタログはコチラ/ \グリッパやカメラを含むシステムの価格など/


外観検査デモ機動画
6軸垂直多関節ロボットOVR6048K1-Vを使用したバイアルキャップ外観検査デモ機です。
ロボットでバイアルをピックアップして、ビジョンセンサ前まで搬送して外観検査を行います。
ロボットは6軸なので手首軸の曲げ、ひねりによりあらゆる方向にアプローチできます。
ビジョンセンサはコグネックス株式会社のIS3800シリーズを使用しています。
<
特徴
小型・軽量

-
本体重量はわずか12.5kg、設置スペースは130×130mm。
持ち運び・据付けが容易なので、ラインへの設置やレイアウト変更にも柔軟に対応。
DC24V電源駆動のため、バッテリ対応のドライバを使用すれば搬送ロボットにも搭載可能です。
手首軸の回転・曲げによるさまざまな角度へのアプローチ

-
5軸多関節に対し、第4軸目に手首回転用のモーターが追加。
これにより手首軸の回転・曲げによるさまざまな角度へのアプローチが実現。
ワークの角度を変えての搬送、ロボット正面でのワークの水平搬送などができます。
かんたんに制御できるコントローラMRC01

-
AZシリーズを搭載しているロボットを制御できるロボットコントローラMRC01です。
プログラミングソフトMRC Studioは(無料)はロボット制御未経験者でもすぐにマスターできるほど簡単なソフトです。
(ダウンロードはコチラ>>)
詳しくは「オリエンタルモーター製ロボットコントローラMRC01をレビューしてみた!」を参照ください。

-
MRC01とドライバを一体化したコントローラユニットもラインアップ。
ロボット導入における制御のハードルを下げ、立ち上げ時間の短縮に貢献します。
ロボットコントローラユニットMRCUシリーズの詳細はコチラ>>
- 注:使用時には産業用ロボットとしての安全を配慮してください。(協働ロボットとしては使用できません)
仕様

*1:当社評価ワークを搭載した値です。
*2:負荷1kg時、高さ25mm、幅300mmの2点間を往復させるのに要する時間です。オリエンタルモーター製ロボットコントローラMRC01を使用した時のサイクルタイムです。
*3:原点ピン穴に位置決めピンを入れた設置原点姿勢の状態より可動できる範囲です。
*4:各軸減速機の仕様値に基づきます。
*推奨電源容量DC24V 600W
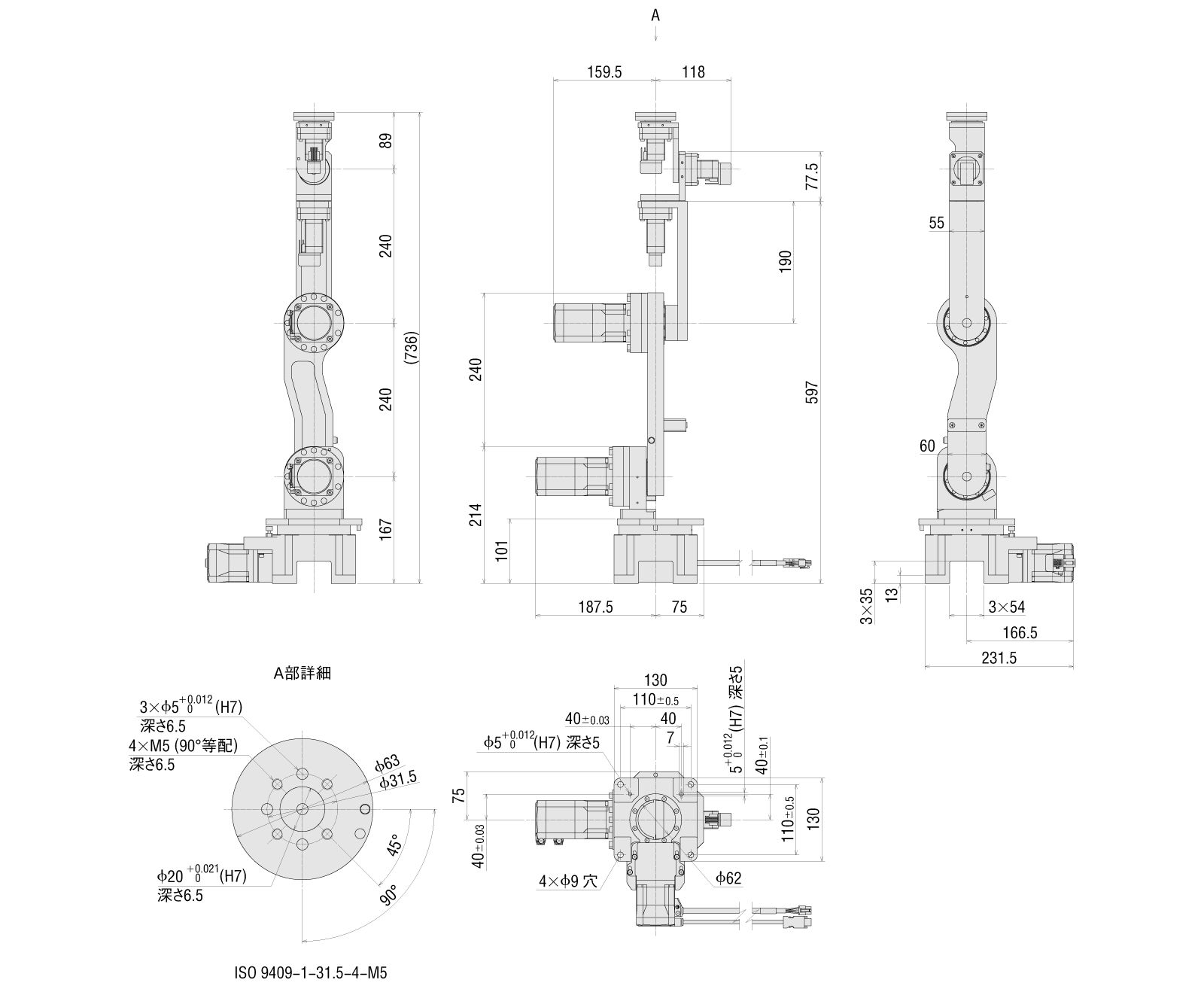
外形図
動作範囲図
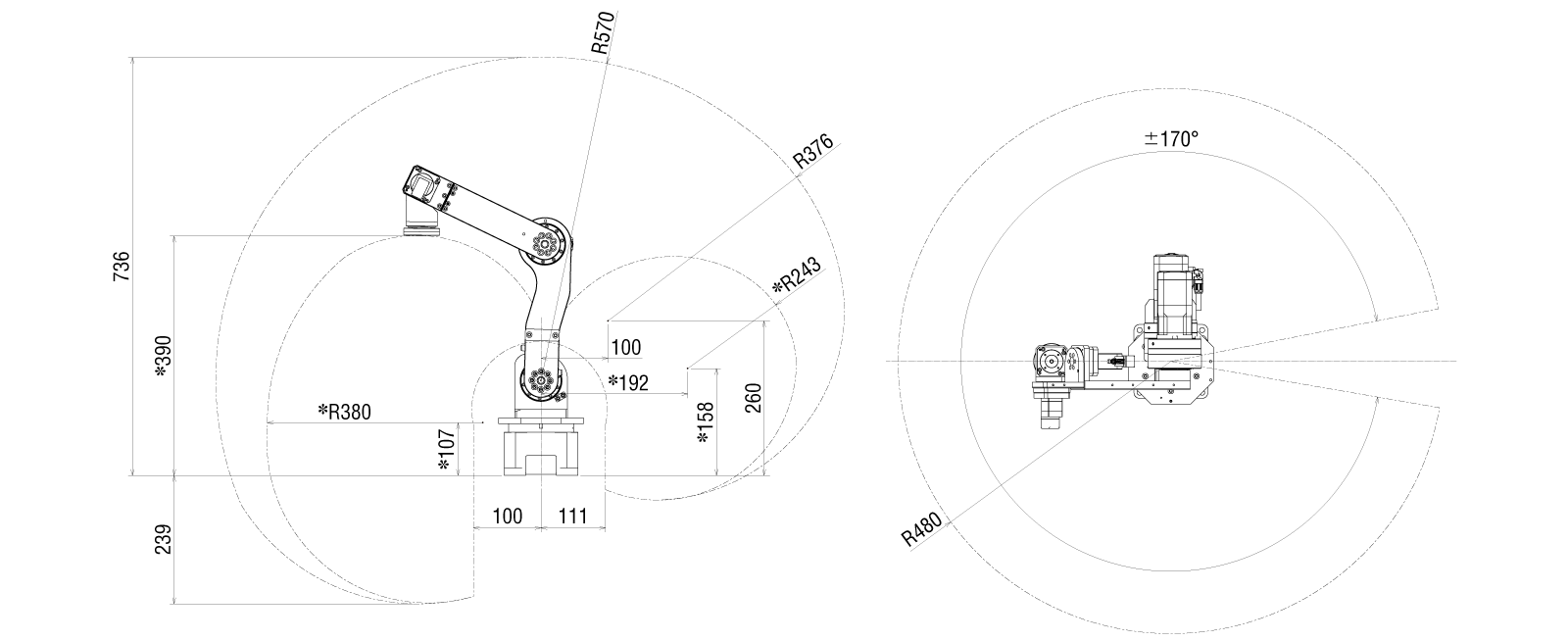
*エンドエフェクタを下向きにしたときに動作できる範囲です。
各種データ
| 取扱説明書 | 取扱説明書(PDF) |
| 3DCAD | OVR6048K1-V(3D) |
| 2DCAD | OVR6048K1-V(2D) |
システム構成
ロボットコントローラMRC01とプログラミングソフトMRC Studioを使用することで簡単にロボット制御が可能です。
MRC01に接続できる推奨ドライバは DC 電源入力タイプの小型ドライバ AZD-KD、またはminiドライバAZD-KR2Dです。
※MRC01とAZD-KR2DがワンパッケージとなったロボットコントローラユニットMRCUシリーズもラインアップ。
早期立ち上げとすっきりとした配線設計が可能です。
ロボットコントローラユニットMRCUシリーズの詳細はコチラ>>

ロボット導入前のお役立ちツール
MRC Studio Simulator

-
ロボット導入を検討している段階で、ロボット本体やMRC01がなくても、
PC上で実際の動きを想定したシミュレーションが可能なソフトウェア(無料)です。
詳しくはこちら>>



