オリエンタルモーター 小型ロボットOVR パラレルリンクロボット

-
小型ロボットOVR パラレルリンクロボット
αSTEP AZシリーズを使用した、軽量・コンパクトなパラレルリンクロボットです。
電子部品など極小部品のパレタイジングに最適です。
ロボットコントローラMRC01/プログラミングソフトMRC Studioを使用すると
はじめての方でも30分程度で動かすことができます。
●可動範囲 X・Y(φ):330mm.Z:190mm
●可搬質量 0.3kg
●本体質量 5kg
\仕様・外形図など詳細はコチラ/ \価格や納期についてはコチラ/

パレタイジング(デモ機)動画
\仕様・外形図など詳細はコチラ/ \価格や納期についてはコチラ/
特徴
本体質量 わずか5kg
オリエンタルモーター製小型モータの採用、シンプル構造により軽量化を実現しました。
架台の強度が抑えられるため、部品のコストダウンに貢献します。
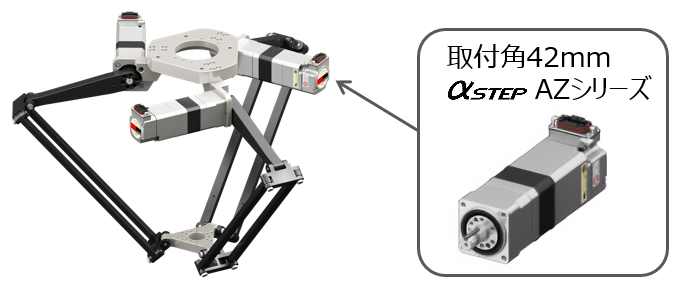 αSTEP AZシリーズの詳細はこちら
αSTEP AZシリーズの詳細はこちら
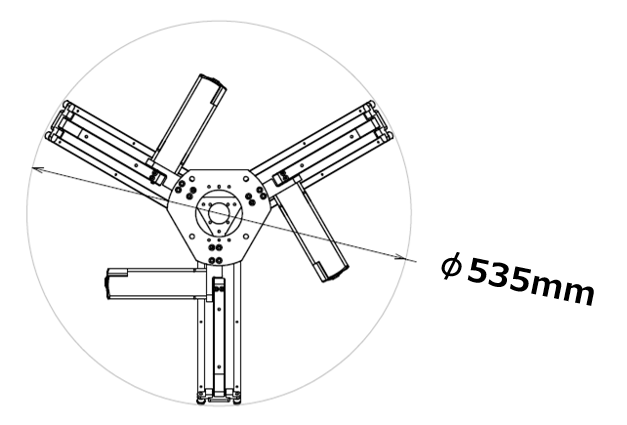
コンパクト設計
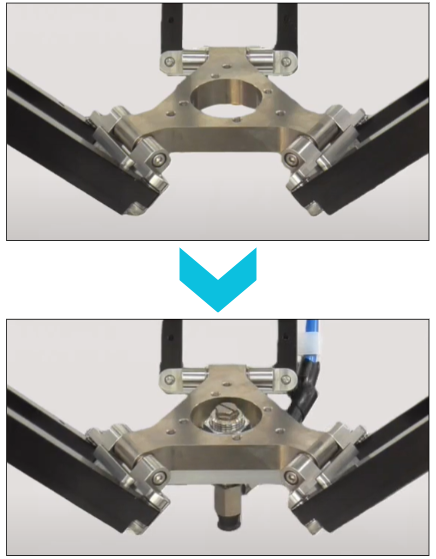
電子部品など極小部品のパレタイジングに最適なコンパクト設計です。また中空構造なのでエア配管、配線を通すことが可能。
設計の自由度拡大に貢献します。
| コンパクト設計 | 中空構造で配線・配管が容易 |
 |
 |
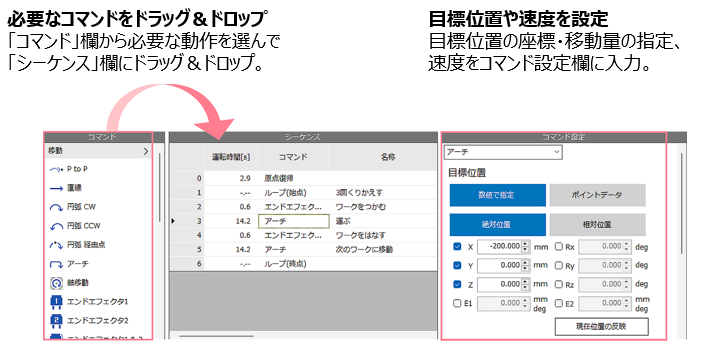
かんたんセットアップ 30分程度で動かせます
ロボットコントローラMRC01とプログラミングソフトMRC Studioを使用することで簡単にロボット制御が可能。
はじめての方でも30分程度で動かせます。 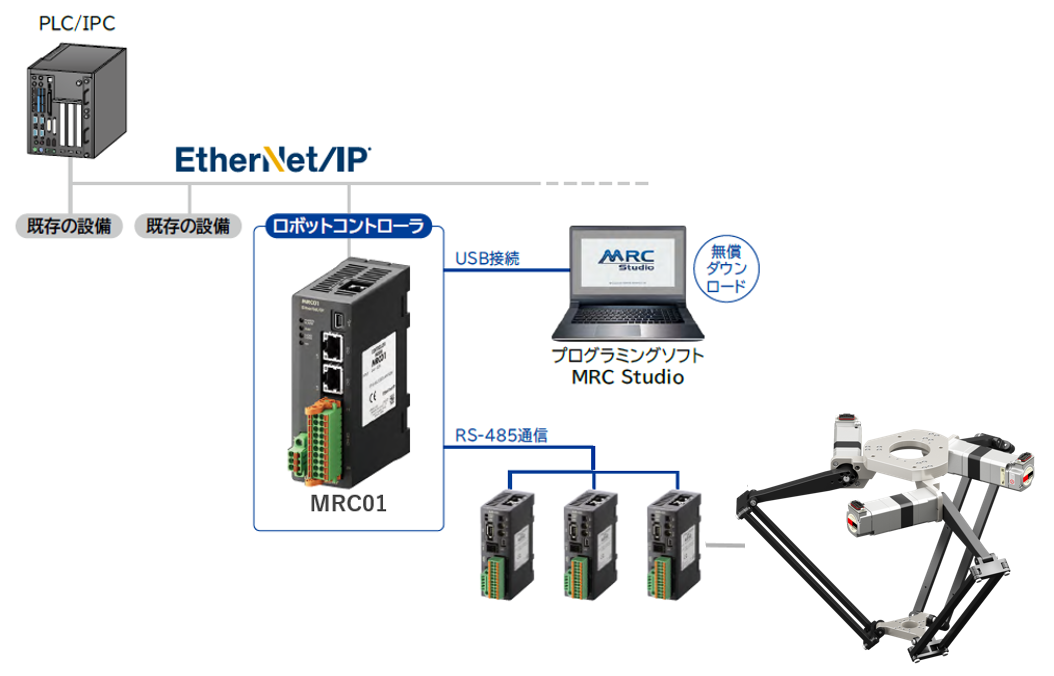
プログラミングソフトMRC Studioは(無料)はロボット制御未経験者でもすぐにマスターできるほど簡単なソフトです。
MRC Studioに機構の諸元が登録されているのでセットアップ時間短縮。プログラミングは簡単なパソコン操作で完了。
ダウンロードはこちら>>
仕様
※発売前のため、内容の変更が発生する可能性がございます。
| 軸数 | 3軸 |
| 入力電圧 | DC24V |
| 可搬質量[kg] | 0.3 |
| 可動範囲[mm] | X・Y(φ) 330mm.Z 190mm |
| サイクルタイム[s] | 0.7※ |
| 本体質量[kg] | 5 |
※負荷0.3kg時、高さ25mm、幅300mmの2点間を往復させるのに要する時間です。オリエンタルモーター製ロボットコントローラMRC01を使用した時の値です。
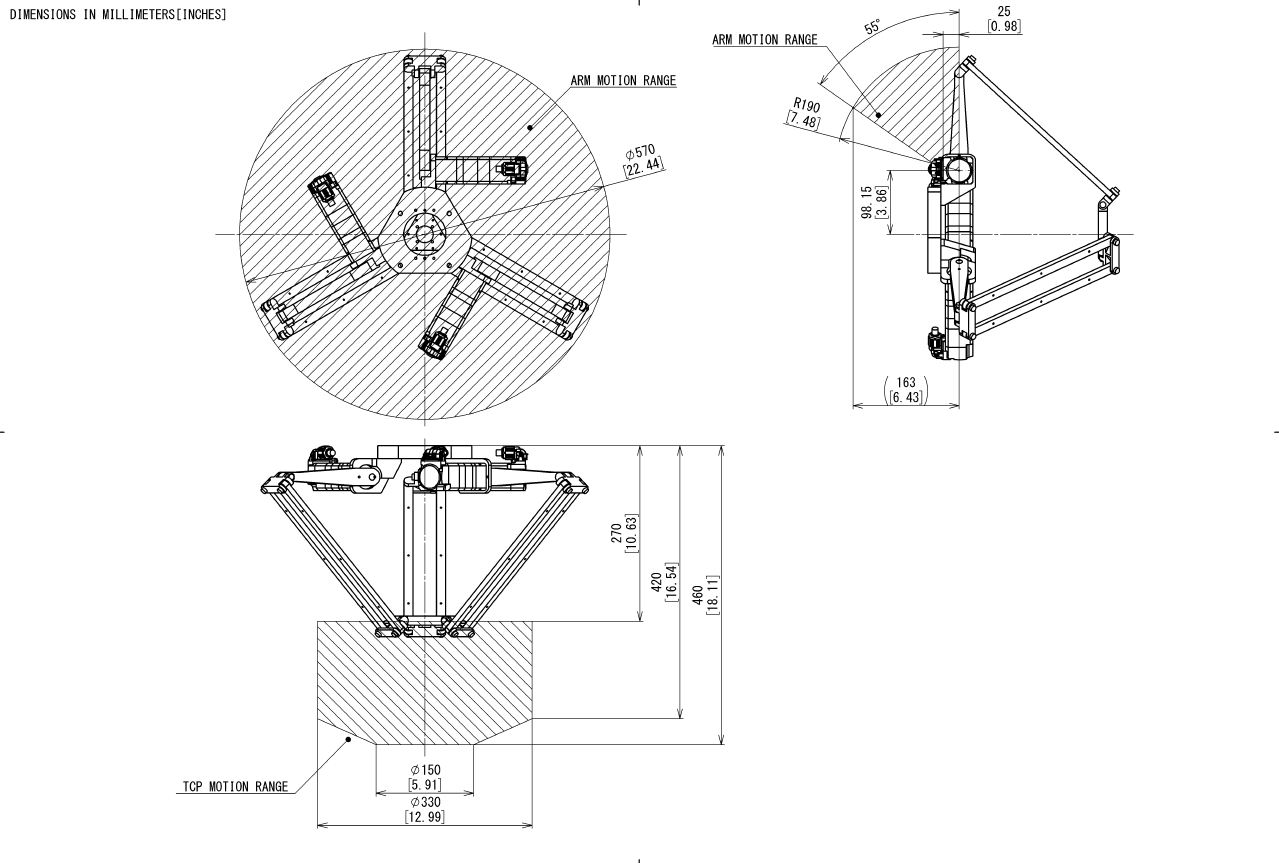
外形・動作範囲図
ロボットで実現したいことはお決まりですか? 気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
