オリエンタルモーター ACサーボモーター AZXシリーズ

-

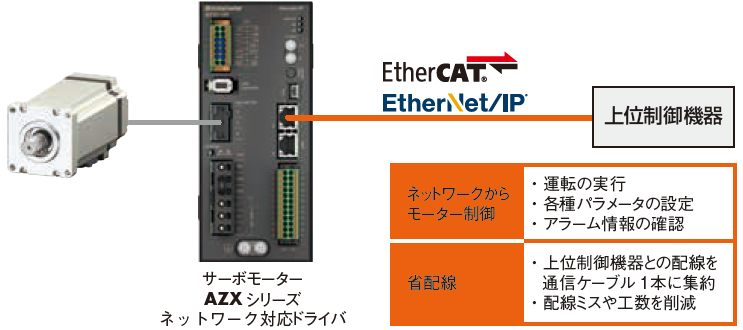
αSTEP(アルファステップ) AZシリーズと同じバッテリレスの機械式アブソリュートセンサを搭載したACサーボモータです。ドライバはEtherCAT、EtherNet/IP に対応しています。上位制御機器とドライバを通信ケーブル1 本で接続できるため、省配線を実現します。AZXシリーズは基本的な操作方法がAZシリーズと同じでありながら、高速域で高トルクを発揮し、装置設計の自由度向上・立ち上げ時間の短縮に貢献します。


特徴
バッテリレスのアブソリュートセンサを搭載したACサーボモータ
AZXシリーズは、AZシリーズと同じバッテリレスの機械式アブソリュートセンサ(ABZO センサ)を搭載しています。
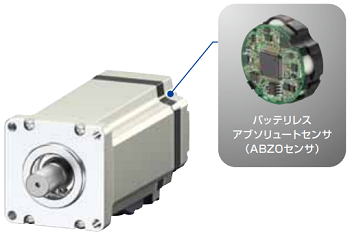 〈機械式センサ〉 非通電時も位置情報を保持 〈多回転アブソリュートセンサ〉 基準となる原点から、モーター軸で±900 回転 (1800 回転分)の絶対位置が検出可能 |
●外部センサ不要 アブソリュートシステムなので、原点センサ、リミットセンサは不要です。 メリット ・高速原点復帰+原点復帰精度の向上 ・コストダウン ・省配線 ・外部センサ誤動作の影響を受けない ●バッテリレス 機械式センサはバッテリが不要です。 位置情報はABZO センサで機械的に管理されています。 メリット ・バッテリの交換が不要 ・バッテリの設置スペースが不要(自由なドライバの設置) ・海外輸送も安心 |
●メリットの詳細については、AZ シリーズ個別カタログ(V-184)からご確認いただけます。
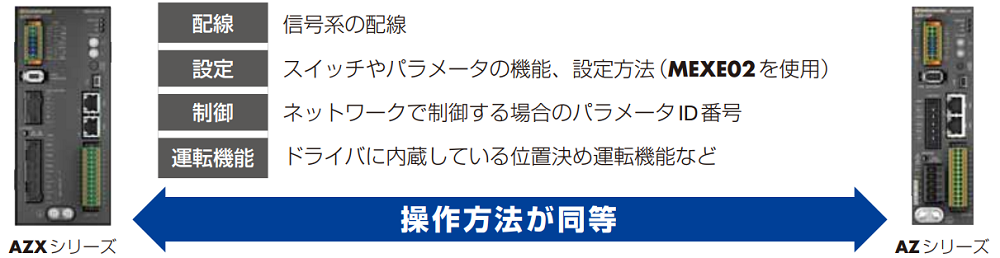
AZシリーズと基本的な操作方法が同じ
AZXシリーズは、AZシリーズと基本的な操作方法が同じです。
同じ装置内で、AZXシリーズとAZシリーズを併用する際に、操作性の変更による手間なく使用できます。
シーケンス機能もAZシリーズと同等
AZXシリーズの位置決め運転には、連結運転や運転間のタイマ設定、条件分岐、ループ回数などの豊富なシーケンス機能を搭載し ています。
サポートソフトMEXE02(無償)を使って設定することができ、上位システムのシーケンスプログラムを簡略化できます。
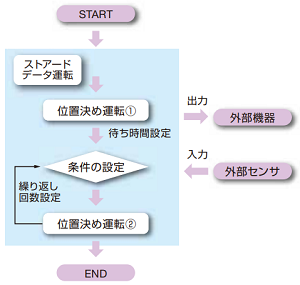 |
●位置決め運転データ設定値(最大256 点) ●汎用入出力点数 (入力6 点、出力6 点) ●通信用入出力点数 (入力16 点、出力16 点) |
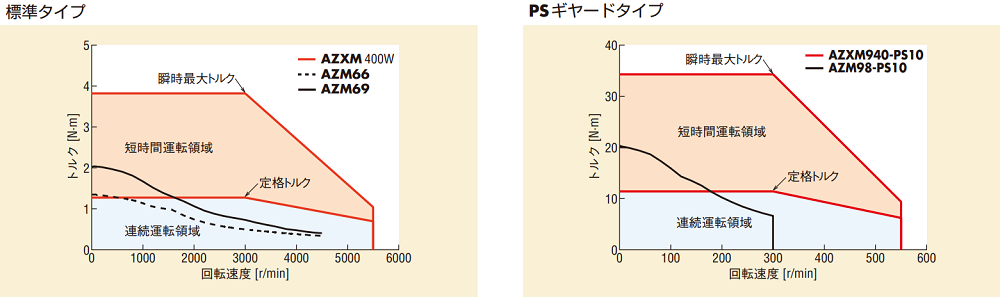
高速域で高トルクを発揮
AZXシリーズとAZシリーズの回転速度―トルク特性の比較です。 AZXシリーズは高速域、AZシリーズは低速域でトルクの優位性があります(短時間運転の場合は全領域においてAZXシリーズが優位になる可能性があります)。
AZXシリーズはロングストローク(特にボールねじ駆動)の位置決め用途に適しています。
EtherNet/IP 対応ドライバ
ドライバはEtherNet/IP に対応しています。上位制御機器とドライバをEtherNet/IP 通信ケーブル1 本で接続できるため、省配線を実現します。
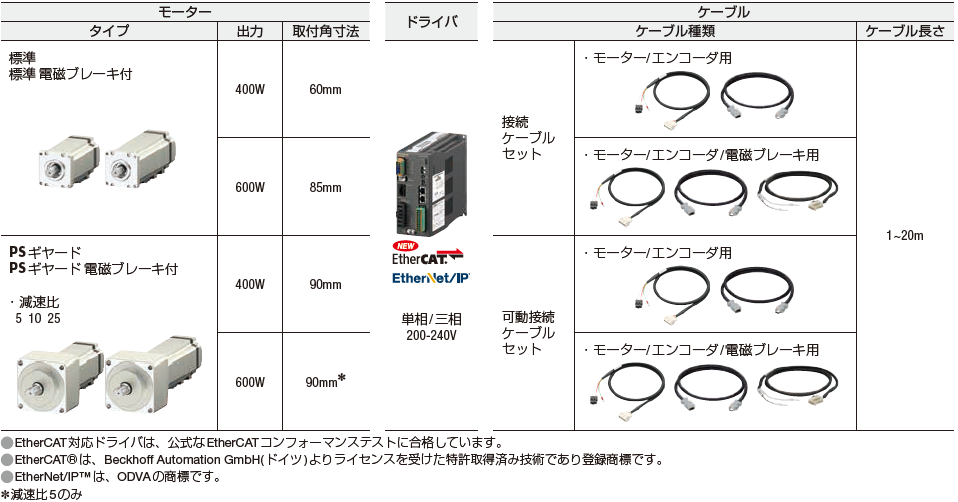
使い分けのヒント
ABZOセンサを搭載しているAZシリーズ、モータの種類としては同じNXシリーズ。類似するこれらのモーターの使い分けのヒントについてご説明します。
| サーボモータ | ||
| 機械式アブソリュートセンサ〈ABZOセンサ〉 | 光学式エンコーダ | |
αSTEP AZシリーズ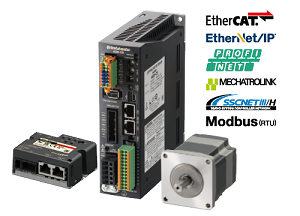 |
AZXシリーズ |
NXシリーズ |
| ・豊富なネットワーク対応 ・バッテリレス アブソリュート ・省配線(コネクタタイプ) ・大慣性駆動 ・ギヤードラインアップ、ドライバラインアップの充実 ・ロボットアーム、電動スライダ/シリンダ、コンベアなど機構との組み合わせ商品が充実 |
・EtherCAT、EtherNetIP対応 ・高速、高出力(400/600W) ・バッテリレス アブソリュート ・ギヤードの高速化(最高回転速度がNXシリーズより高い) ・エンコーダ 16bit |
・省スペース (L寸がAZXの-10mm) ・高速、高出力(最大750W) ・トルク制御/張力制御 搭載 ・エンコーダ 20bit |
ラインアップ
モーター、ドライバ、接続ケーブルは別手配です。品名の見方はこちらをご覧ください。
モータ
| タイプ | 取付角寸法 | 400W | 600W |
| 標準タイプ | 60mm | AZXM640AC | |
| 標準タイプ 電磁ブレーキ付 | 60mm | AZXM640MC | |
| 標準タイプ | 85mm | AZXM960AC | |
| 標準タイプ電磁ブレーキ付き | 85mm | AZXM960MC | |
| PSギヤードタイプ | 90mm | AZXM940AC-PS5 AZXM940AC-PS10 AZXM940AC-PS25 |
AZXM960AC-PS5 |
| PSギヤードタイプ 電磁ブレーキ付 | 90mm | AZXM940MC-PS5 AZXM940MC-PS10 AZXM940MC-PS25 |
AZXM960MC-PS5 |
ドライバ
| 電源入力 | タイプ | 品名 |
| 単相/三相200-240V | EtherCAT | AZXD-SED |
| 単相/三相200-240V | EtherNet/IP | AZXD-SEP |

接続ケーブルセット/可動接続ケーブルセット
ケーブルが屈曲される場合には、可動接続ケーブルセットをお使いください。
接続ケーブルに継ぎ足しできる中継ケーブルセット、可動中継ケーブルセットもご用意しています。
詳細はこらちをご覧ください。
主な仕様
標準タイプ 取付角寸法 60mm、85mm
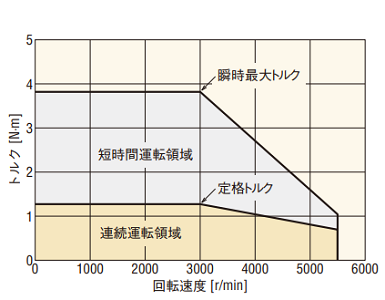
※AZX640□Cのグラフです。その他の製品はカタログにて確認ください。
| モータ品名 | 片軸シャフト | AZXM640AC | AZM960AC |
| 電磁ブレーキ付 | AZXM640MC | AZM960MC | |
| ドライバ品名 | AZXD-SED、AZXD-SEP | ||
| 定格出力 | W | 400 | 600 |
| 定格回転速度 | r/min | 3000 | 3000 |
| 最高回転速度 | r/min | 5500 | 5500 |
| 定格トルク | N・m | 1.27 | 1.91 |
| 瞬時最大トルク | N・m | 3.82 | 7.16 |
| ローター慣性モーメント | J:kg・m2 | 0.294×10-4 [0.316×10-4]※1 | 0.948 x 10-4 [1.03 x 10-4]※1 |
| 許容慣性モーメント※2 | J:kg・m2 | 14.7×10-4 | 47.4 x 10-4 |
| 分解能 | P/R | AZXD-SEP:100~10000(出荷時設定AZXD-SED: 10000、AZXD-SEP:1000) |
|
| 検出器 | 機械式多回転アブソリュートエンコーダ1回転:16bit 多回転:±900回転(1800回転分) | ||
※1:[ ]内は電磁ブレーキ付モータを接続したときの値です。
※2:ローター慣性モーメント比50倍の値です。
【ご注意】モータを定格で連続運転する場合は、以下のサイズのアルミ板相当以上の放熱板が必要です。 300mm×300mm 厚さ 10mm
【ご注意】運転条件によっては回生抵抗が必要となる場合があります。
【ご注意】瞬時最大トルクは三相200-240V入力の場合です。
PJギヤードタイプ 取付角寸法 90mm
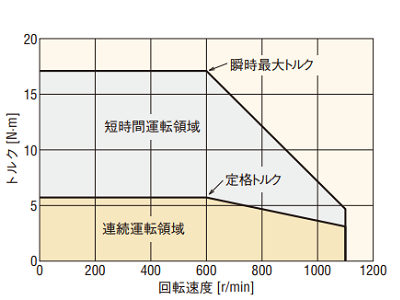
※AZX940□C-PS5のグラフです。その他の製品はカタログにて確認ください。
| モータ品名 | 片軸シャフト | AZXM940AC-PS5 | AZXM940AC-PS10 | AZXM940AC-PS25 | AZXM960AC-PS5 |
| 電磁ブレーキ付 | AZXM940MC-PS5 | AZXM940MC-PS10 | AZXM940MC-PS25 | AZXM960MC-PS5 | |
| ドライバ品名 | AZXD-SED、AZXD-SEP | ||||
| 定格出力 | W | 400 | 600 | ||
| 定格トルク | N・m | 5.72 | 11.4 | 25.7 | 8.6 |
| 瞬時最大トルク | N・m | 17.1 | 34.3 | 77.2 | 32.2 |
| 速度範囲 | r/min | 0~1100 | 0~550 | 0~220 | 0~1100 |
| ローター慣性モーメント | J:kg・m2 | 0.294×10-4 [0.316×10-4]※1 | 0.948×10-4 [1.03×10-4]※1 | ||
| 慣性モーメント※2 | J:kg・m2 | 0.163×10-4 | 0.160×10-4 | 0.175×10-4 | 0.163×10-4 |
| 許容慣性モーメント※3 | J:kg・m2 | 0.037 | 0.147 | 0.919 | 0.119 |
| 減速比 | 5 | 10 | 25 | 5 | |
| 分解能 | P/R | 500~50000 (出荷時設定 AZXD-SED:50000 AZXD-SEP:5000) |
1000~100000 (出荷時設定 AZXD-SED:100000 AZXD-SEP:10000) |
2500~250000 (出荷時設定 AZXD-SED:250000 AZXD-SEP:25000) |
500~50000 (出荷時設定 AZXD-SED:500000 AZXD-SEP:50000) |
| 検出器 | 機械式多回転アブソリュートエンコーダ 1回転:16bit 多回転:±900回転(1800回転分) |
||||
※1:[ ]内は電磁ブレーキ付モータを接続したときの値です。
※2:ギヤ部の内部の慣性モーメントをモータ軸に換算した値です。
※3:ローター慣性モーメント比50倍の値です。
【ご注意】運転条件によっては回生抵抗が必要となる場合があります。
【ご注意】瞬時最大トルクは三相200-240V入力の場合です。
