モバイルロボットコントローラ MVC01

-
上位制御機器からの指令に基づき、搬送ロボットのモーターを制御する、モバイルロボットコントローラです。
ブラシレスモーターBLVシリーズRタイプと組み合わせが可能です。
●搬送ロボットAGV/AMRの走行制御機能を搭載
●専用PCソフトで立ち上げからメンテナンスまでをサポート
●IMU搭載でジャイロオドメトリを出力
●ROS2用ツールをご用意
\パンフレットのダウンロードはコチラ/ \価格や納期に関してはコチラ/


特徴
モバイルロボットコントローラ - 搬送ロボットの正確な運転を実現
●モバイルロボットコントローラは、上位制御機器からの指令に基づいて搬送ロボットのモーターを制御します。
●自ら走行座標を把握することで、より正確な運転を実現します。
●上位制御機器で直接制御する場合と比較して、ROSノードや自作プログラムを削減できるため、ソフトウェア設計の負担を軽減できます。
●モバイルロボットコントローラは、ブラシレスモーターBLVシリーズRタイプと組み合わせが可能です。

\パンフレットのダウンロードはコチラ/ \価格や納期に関してはコチラ/
※ 当社ではモータに合わせたイノアック、ナブテスコ製のタイヤも取り扱っています。 詳細はこちら>>
上位制御機器と役割を分担し、ソフトウェア開発の負担を軽減
モバイルロボットコントローラは、AGV/AMRの走行に必要な走行制御機能を搭載しています。
車輪ごとの計算や軸間同期制御はモバイルロボットコントローラがおこなうため、ソフトウェア開発の負担軽減と立上げ時間の短縮に貢献します。
搬送ロボット(AGV/AMR)の走行制御機能をモジュール化
| 上位制御機器のみで制御 | 「上位制御機器+モバイルロボットコントローラ」で制御 |
| 上位アプリケーション、走行制御アプリケーション共に上位制御機器が担当 | 【役割を分担】 ・走行制御アプリケーション→モバイルロボットコントローラが担当 ・上位アプリケーション→上位制御機器が担当 |
| ソフト設計負担 大 | ソフト設計負担 小 |
|構成部品比較(AMRの場合)
|アプリケーションの比較
走行制御のモジュール化による車輪や駆動方式などのカスタマイズ性の向上
ソフトウェアをすべてROSで開発した場合、車輪の変更など機構をカスタマイズした際にはROSのプログラムを変更する必要があり変更負荷も大きくなります。
走行制御部分にMVC01を使うことで、車輪を変更した場合でも上位側の設定はそのまま、MVC Studioで簡単に再設定が可能です。
 |
ロボットをカスタマイズ |
 |
| 差動駆動 | メカナムホイール | |
| 車輪構成、ロボットのサイズ等の変更はMVC01を再設定するだけ | ||
IMUによる正確な位置情報取得によりスリップを検知
モバイルロボットコントローラはIMUを搭載しているため、 ジャイロオドメトリで算出した位置情報を出力できます。
ジャイロオドメトリとは、IMUとモーターのエンコーダ情報から位置情報を推定する手法です。
不安定な場所を走行する場合、スリップによって実際のロボットと位置情報に誤差が生じやすくなりますが、IMUによって、より高精度な位置情報を出力できます。
 |
慣性計測ユニット(IMU) |
| 加速度センサとジャイロセンサを合わせたセンサ。 3次元の慣性運動(直交3軸方向の並進運動と回転運動)を検出する。 |
|
 |
設計に組み込みやすいコンパクトサイズ
狭いスペースにも収まるコンパクトサイズです。BLVシリーズRタイプのドライバと同等のサイズ感です。
| モバイルロボットコントローラ 質量:60 g |
BLVシリーズRタイプドライバ 質量:120 g |
 |
 |
無料のサポートソフトMVC Studio
 |
モバイルロボットコントローラの立ち上げからメンテナンスまでサポートするソフトウェアをご用意しています。 各種パラメータの設定・編集が行えるほか、各種状態のモニタを行うことができます。 ソフトは無料でダウンロードいただけます。 サポートソフト MVC Studio の詳細はこちら |
ガイダンスに従って、迷わず初期設定
駆動方式(2輪駆動、4輪駆動等)の選択や機構情報の入力など、一連の初期設定をウィザード形式でおこなえます。
イラストを見ながらガイダンスの指示に従って設定することで、初めてでも短時間で設定できます。
手順に従って設定
ウィザードメニューに従ってロボットの初期設定をすすめます。
| ①ロボットタイプの選択 | ②軸の設定 |
| 2輪駆動、4輪駆動を選択 | 各軸ごとにギヤ比、回転方向を設定 |
 画像を拡大する
|
 画像を拡大する
|
| ③ロボットの情報設定 | ④キャリブレーション |
| ロボットの機構情報を設定 | IMUのキャリブレーションを実行 |
 画像を拡大する
|
 画像を拡大する
|
| ⑤動作確認 | |
| テスト運転を実施 | |
 画像を拡大する
|
立ち上げ・メンテナンスに役立つパラメータ設定、モニタ機能
| パラメータ設定 | モニタ機能 |
| 設定したデータはPCに保存できるため、 コントローラを交換しても同じ設定で使用可能です。 |
ロボットの位置、速度、入出力信号、アラームなどをモニタできます。 |
 画像を拡大する
|
 画像を拡大する
|
プログラム作成をサポート
ROS2用ツール(ROSノード、マニュアル、サンプルコード)をご用意しています。
また、初めてのROS制御に不安がある、プログラム設計の時間を短縮したいという場合には、
モバイルロボットコントローラとの連携も含めたサンプルプログラムの作成もおこなっています。
プログラムサポート適応範囲
※ 外界センサ(ライントレーサやLiDAR)を用いた自律走行のサポートはお受けいたしかねます。 |

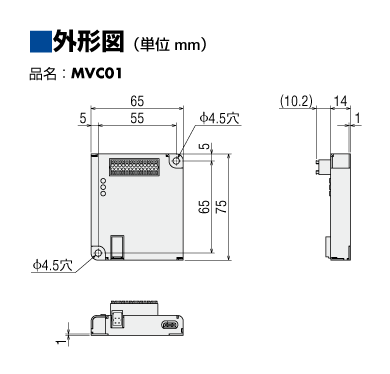
仕様・外形図
仕様

外形図
各種データ
| 技術資料 | TN-MVC1J.pdf |
| 3DCAD | R019.zip |
| 2DCAD | R019.dxf |
組み合わせ・関連製品
ブラシレスモーター
モーターは、ブラシレスモーターBLVシリーズRタイプと組み合わせることができます。
BLVシリーズRタイプには、車輪を直接取り付けできる駆動車輪用モーターもご用意しています。

AGV/AMR用 車輪
ブラシレスモーターBLVシリーズRタイプと組み合わせ可能なAGV/AMR用の車輪も取り扱っています。


ジップチェーンアクチュエータ®
今までにない超低床、省スペースな直動機構です。AGV・AMRで使用する上下搬送装置に最適です。

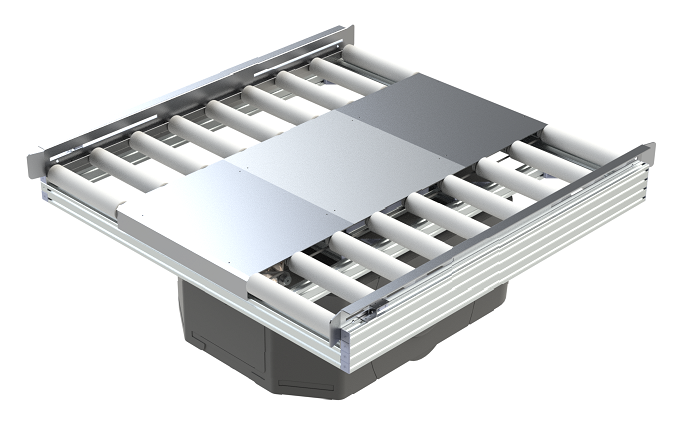
移載用コンベア
搬送ロボット(AGV・AMR)に搭載して使用できる移載用コンベアです。
寸法やコンベアの種類など、まずはお問い合わせください。
※下記はコンベアの一例です。
 |
お気軽にご相談ください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
