Piezo Sonic 超音波モータ

-
ピエゾソニック モータ( 高トルク型 超音波モータ)は磁石やコイルを利用せず、
圧電セラミックを振動させ、そのエネルギーを駆動力としています。
摩擦を利用して回転するため、小型 ・軽量でありながら同サイズの DCモータと比べ
約5倍~10倍の高トルクを発揮するモータです。


超音波モータの概要
圧電セラミックを振動させ、そのエネルギーを駆動力としています。駆動源にコイルや磁石を利用しないため、非磁性モータを構築することができ、
MRI内などの高磁場環 境や磁場の影響をきらう半導体製造装置内 などで安心してご利用いただけます。
また、接続部には高い圧力がかかっており、この摩擦を利用することで電力ゼロでもモータシャフトが回転せず、非通電、非制御で姿勢・状態を保持することができます。
バックラッシュがないために装置のダイレクトドライ ブによる高精度な位置制御が可能です。
起動、静止の応答性も高く、ステージなどの搬送装置や カメラの雲台、ジンバル、割り出し装置、多関節ロボットの関節用のモータとして最適です。
小型・静音でありながら、薄型で高トルク、高保持力を持ちながら精密な位置決めが可能なモータです。


| 超音波モータは他のモータに比べ、低速・高トルクという 特徴を持ちます。 摩擦力により非制御時でも高保持力を維持でき、バックラッシュもないため、ギアを使わないダイレクトドライブ の アクチュエータシステムを構築する ことが可能です。小型・静音でありながら、薄型で高トルク、高保持力を 持ちながら精密な位置決めが可能なモータです。 |
超音波モータは 他のモータに比べ、軽量で高い位置制御性を有するという特徴を 持ちます。 回転部の重量が軽いためイナーシャが小さく、駆動信号 が停止すると 瞬時に摩擦力により静止するため、精密な位置決めが可能です。 小型・静音であり ながら、薄型で高トルク、高保持力を持ちながら精密な位置決めが可能なモータで す。 ※最終的な位置決め精度は外部のセンサ:エンコーダやポテンショメータと 制御コントローラに依存します。 |
モーター仕様
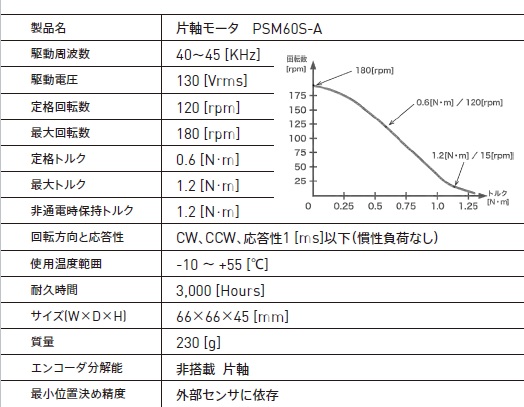
-
※磁場環境用モータはすべて非磁性部品を使用しています。

ドライバ
2タイプのドライバをご用意しています。

PSMD-SPC:2本のポート信号(Active Low)とDC0~3.2[V]でモータを制御し、エンコーダ信号による速度制御も可能です。

PSMD-PCC:PSMD-SPCの機能に加え、USBで接続したPCから モータの回転方向、速度を直接操作する デジタルコントロールが可能なモデルです。
回転方向制御用TTL信号や速度制御用アナログ電圧を入力することなしに、デジタル信号でモータの制御が可能。
超音波モータを精密にコントロールする用途に最適です。
小型・静音でありながら、薄型で高トルク、高保持力を持ちながら精密な位置決めが可能なモータです。オフィス等で利用可能な小型の搬送装置、
小型の仕分け・分配装置、監視、記録カメラのための静音移動装置、姿勢制御のためのジンバル装置、MRI内などの高磁場環 境や磁場の影響をきらう
半導体製造装置内、医療機器 MRI 内での搬送用・駆動用モータ、微細制御が可能なロボットアーム、強放射線環境での駆動用モータなど、
回転・静止を繰り返す動作に最適です。
