オリエンタルモーター αSTEPの原理と構造
ハイブリッド制御システム αSTEP(アルファステップ)の原理と構造
ステッピングモータに新開発のABZO(アブゾ)センサを搭載し、 バッテリレスのアブソリュートシステムの構築を実現。 また、駆動システムはハイブリッド制御システムを採用。 使いやすさと信頼性を両立しました。小型・低コストの、バッテリレスの機械式アブソリュートセンサを開発しました(特許取得)。生産性の向上やコスト削減に貢献します。
ABZOセンサ

ローター回転位置による磁気抵抗の変化をセンサ巻線で検出します。
パルス列信号の指令位置に対する、実際のローター回転位置の偏差(遅れ/進み)を偏差カウンタで演算します。 偏差カウンタの演算結果から「過負荷領域」を判別し、オープンモード/クローズドモードの制御を切り替えて運転します。
● 通常時は、オープンモードで運転します。
● 過負荷時は、クローズドモードで運転します。
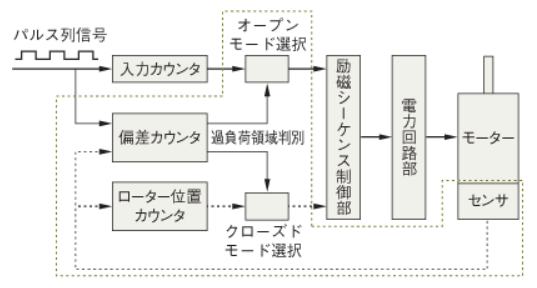
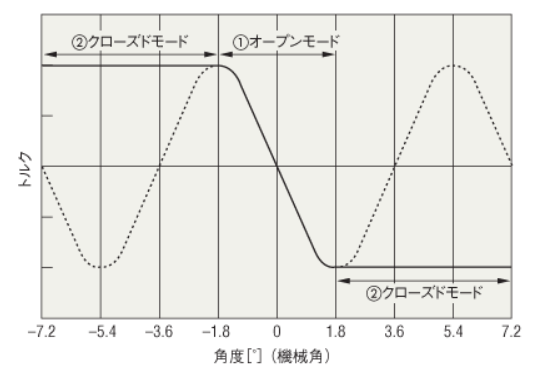
クローズドモードでは、ローター回転位置に対して瞬時最大トルクが発生するようモータ巻線の励磁状態を制御します。 この制御方式によって、角度―トルク特性に不安定点(過負荷領域)はありません。
多回転アブソリュートセンサ 基準となる原点から、モータ軸で±900回転(1800回転分)の絶対位置が検出可能です。 ※ 取付角寸法20mm、28mm(30mm)は±450回転(900回転分)です。
高速原点復帰+原点復帰精度の向上 ABZOセンサなら、原点センサ無しで原点復帰ができます。
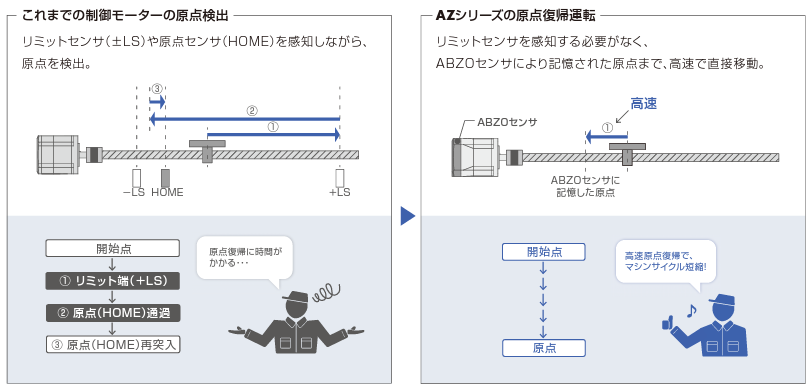
センサの感度を気にせず、高速の原点復帰を実現し、マシンサイクルを短縮します。同時に、センサの感度による原点位置のバラつきが起こらなくなります。原点の精度を向上できます。
ハイブリッド制御
■通常時はオープンループ制御で、ステッピングモータ同様の使いやすさ
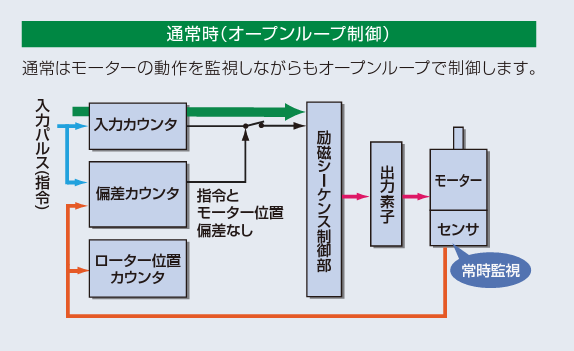
高応答 ステッピングモータの高応答をいかし、短い距離を短時間で動かすことができます。指令に対して遅れなく、追従して動かせます。
■ハンチングなしで停止位置を保持
位置決め時にはハンチングなくモータ自身の保持力によって停止するため、低剛性機構で停止時に振動があっては困る用途に最適です。
■チューニング不要
通常時はオープンループ制御で運転するため、ベルト機構やカム、チェーン駆動などの負荷変動などがある場合も、ゲイン調整なしで位置決め可能です。
■過負荷時にはクローズドループ制御で、より確実な運転
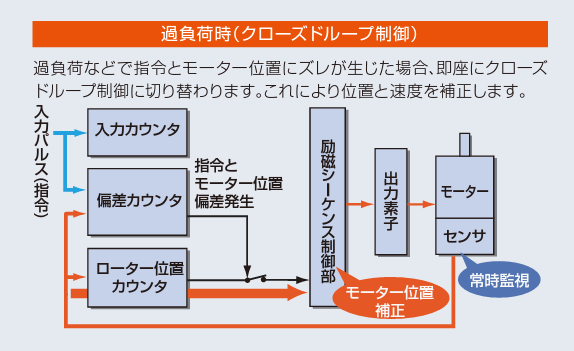
急激な負荷変動、急加速でも運転を継続 通常時は、指令に同期してオープンループ制御で運転します。過負荷時には即座にクローズドループ制御に切り替わり、位置の補正をおこないます。 万が一の異常時にはアラーム信号を出力 連続した過負荷が加わった場合にはアラーム信号を出力し、位置決め完了時には、END信号を出力します。よってサーボモータ同様の信頼性も備えています。
5種類のドライバと組み合わせが可能です。
組合わせるドライバに関する詳細についてはこちらを参照ください。
