オリエンタルモーター ACモーターの原理と構造
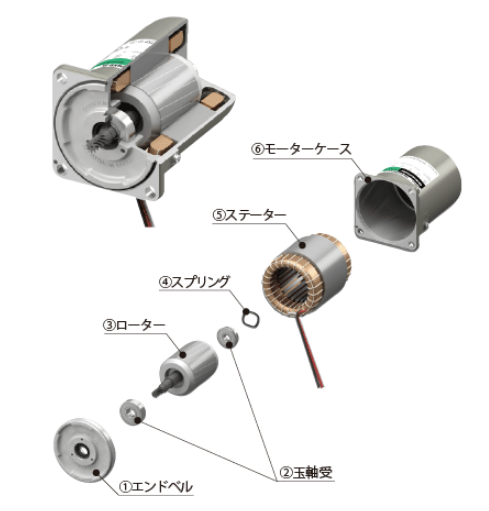
ACモータの原理と構造 インダクションモータの基本的な構造を以下に示します。(下段にインバータの記載があります)
-
① フランジブラケット アルミニウム合金ダイキャスト品を切削加工したものです。モータケースに圧入されています。
② ステータ 電磁鋼板を積層したステータコア、ポリエステル被膜銅線の巻線、絶縁用のフィルムなどからなります。
③ モータケース アルミニウム合金ダイキャスト品の内部を切削加工しています。
④ ロータ 積層した電磁鋼板とアルミニウム合金ダイキャストの導体からなります。
⑤ 出力シャフト 材質はS45Cなどを使用しています。 ギヤヘッドと組み合わせるために精密な歯切り加工が施されているタイプと丸シャフトタイプがあります。
⑥ ボールベアリング
⑦ リード線 耐熱性のポリエチレン被膜を主に使用したリード線です。
⑧ 塗装 アクリル樹脂、あるいはメラミン樹脂を使用した焼付塗装です。
■インダクションモータの動作原理
インダクションモータ(誘導電動機)は、電磁気の誘導作用によって回転力を発生するモータです。 なお、取り扱っているAC小型標準モータのうち、レバーシブルモータ、トルクモータ、電磁ブレーキ付モータ、防塵・防水モータ、クラッチ・ブレーキ付モータなどのモータ種類(分類)は、特性や付加機能の違いによるもので、動作原理そのものはインダクションモータと同じです。
レバーシブルモータは正逆転が簡単にできる、また、電磁ブレーキ付きモータは停止時に保持力があります。トルクモータは巻き取り運転ができます。防塵防水(IP67)仕様のモータが防水モータです。
■回転磁界について
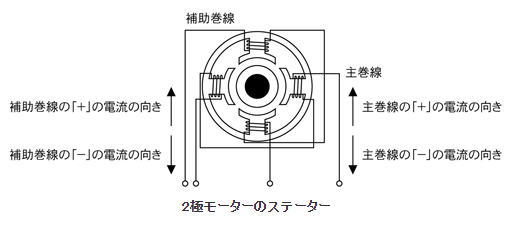
ステータに発生する回転磁界の様子を、2極モータのステータを例に説明します。 インダクションモータには主巻線と補助巻線の2つの巻線があります。
実際の単相電源で使用するインダクションモータでは、以下のような接続をしています。
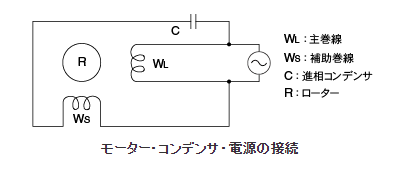
主巻線には電源からの電流がそのまま流れ、補助巻線には進相コンデンサを介して電流が流れます。 このとき、補助巻線に流れる電流は、主巻線に流れる電流に対して、位相が電気角で90°ずれた波形となります。
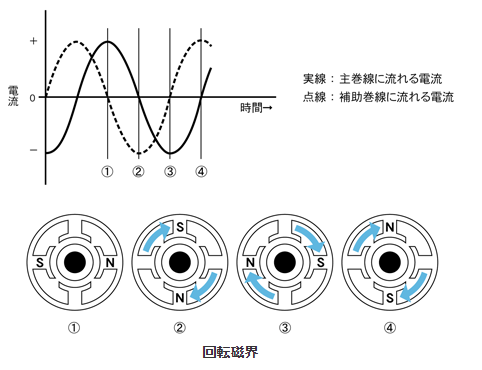
①~④の各時間において、ステータには右ねじの法則によって上図のように磁極が発生します。①→②→③→④の時間経過で見ると、①で3時の位置にあった N極が、順に3時→6時→9時→12時というように、あたかも時計方向に回転しているように変化します。 これがステータに発生する回転磁界です。
ここで進相コンデンサに接続された補助巻線の電流がない場合を考えます。この場合、上図の②と④の状態がなく、①→③への変化となります。
N極の位置は3時→9時と180°変わって、磁極が回転したようにも見えますが、時計方向と反時計方向のどちらの方向から回転したのかが分かりません。
このように単相電源で運転する場合には、進相コンデンサを使って位相がずれた電流を作り出すことで、定まった方向の回転磁界を発生させています。
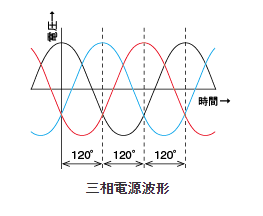
三相電源でモータを運転する場合には、進相コンデンサは不要です。 これは、三相電源があらかじめ位相のずれた波形を持っているからです。
| 他のモータはどうなってるの? IPMモータ・ブラシレスモータの構造や動作原理はこちら⋙ |
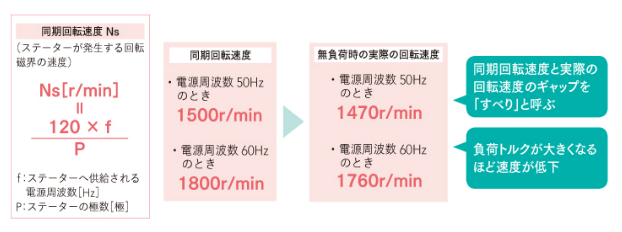
■回転速度
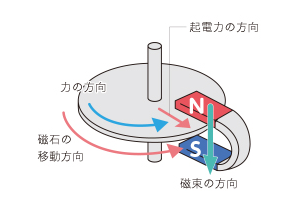
ロータはロータは回転する磁束(回転磁界)について回ります。回転磁界の速度を「同期回転速度」と呼び、下の式から求めます。 実際の回転速度は、無負荷時でも回転磁界速度(同期回転速度)に対して少し遅れて回転(すべり)します。これは磁束が導体を横切ることで初めて誘導電流が発生し、 回転力が生まれることに由来します。
■インダクションモータの回転速度-トルク特性
インダクションモータの回転速度―トルク特性は下図のようになります。
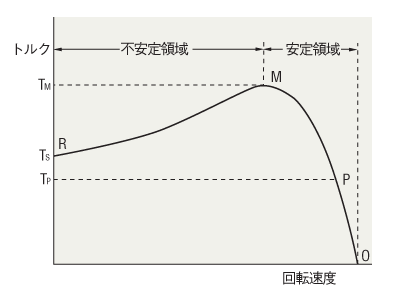
インダクションモータの回転速度―トルク特性 無負荷の場合は同期回転速度に近い速度で回転しますが、負荷の増加とともに回転速度は落ちて、負荷とモータのトルクTPが釣り合った点Pで回転します。 さらに負荷が増加してM点に至れば、モータはこれ以上のトルクを発生できないのでR点に至って停止します。
すなわちR-M間は不安定な範囲で、モータとして安定して運転できるのはM-O間になります。 なお、インダクションモータにはコンデンサラン型単相誘導電動機と三相誘導電動機の2種類があり、単相タイプの場合は一般に起動トルクが運転トルクより小さくなります。三相タイプの場合は比較的起動トルクが大きな特性となります。AC小型標準モータは、電源周波数と極数によって基本の回転速度(同期回転速度*)が決まります。 製品の多くは4極ですから、同期回転速度は以下のとおりです。
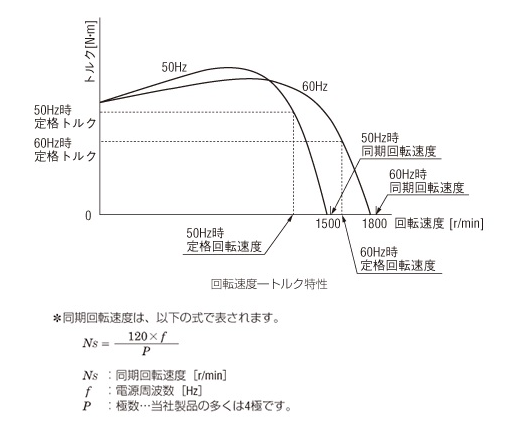
50Hzの場合:1500r/min 60Hzの場合:1800r/min で回転します。実際の回転速度は負荷トルクが必要ですのでこの回転速度より変化します。 定格トルクと同等の負荷トルクをかけたときに、おおむね以下の回転速度になります。 50Hzの場合:1200~1300r/min 60Hzの場合:1450~1600r/min。ステータの回転周期にロータが追い付かない状態を起こし、これを「すべり」と呼びます。この「すべり」が大きいほど発熱と関係してきます。ACモータの発熱はモータケース温度で 80℃ほどまで問題なくご使用いただけます。誘導電動機全般で発熱が問題視され、温暖化(CO2)対策の対象でもあります。温暖化対策に向けて、効率の良いモータへの置き換えとして、IPMモータやBL(ブラシレス)モータへの切り替えが進んでいます。
AC小型標準モータは、この範囲内で製品ごとに定格回転速度が決められています。 より詳細に機器の速度を算出する場合には、この定格回転速度を参考にしてください。
また、電源周波数は地域によって異なります。さまざまな地域で使用する自動機器の場合は、ギヤヘッドの減速比を変えるなどして使い分けてください。
AC小型標準モータは、モータの取付角や長さの違いによって、発生するトルクが変わります。オリムベクスタではモータサイズと出力を体系化し、出力1W~2.2kWまでの製品をご用意しています。 負荷トルクに応じて、豊富なバリエーションの中からモータをお選びいただけます。
ACモータの取付形状・出力比較はこちら⋙
以上のようにAC小型標準モータは電源周波数に応じて速度が変化する性質があります。例えば50Hz地域で装置を組上げ、60Hz地域で使用する場合、試運転時の速度で動かないといったことも発生します。また、装置を海外に輸出する際にも、使用する国の電源周波数に合わせて立ち上げる必要があります。このわずらわしさをインバータと併用することで解消することができます。
インバータとの組み合わせデータ
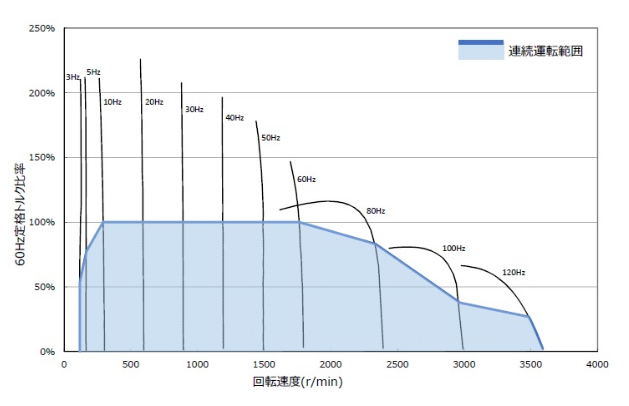
ACインダクションモータを変速させるには、インバータを使用して電源周波数を変化させて使用します。50Hz帯で1500rpmが定格回転数ですので、インバータで10Hzの設定にすると300rpmで回転します。インバータ自体は400Hzまで周波数を変えられますが、インダクションモータはここまで追従できません。下限は10Hzから上限で120Hz程度までで使用できます。一般的には、装置立上げ地域での周波数で使用する組合せでモータを選定し、装置使用先での周波数へ微調節させて使うことが多いようです。また、3相モータを使用する場合、単相モータと比べて起動トルクが高いことから、電源投入と同時に急激に回り始めます。kWクラスの3相インダクションモータを使用する際には、回りだしを緩やかにするためインバータのスロースタート機能を使用することが多いようです。
富士電機FRENIC-Miniと組み合わせた回転数ートルクが以下になります。詳細設定値はこちら⋙
ご不明点はお問い合わせください
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
