よくある質問(Q&A)
-
- 原点を基準に一定距離移動(ピッチ送り)するコンベアを設計しています。オリエンタルモーター製AZシリーズを使えば外部センサが不要とありましたので採用を検討しています。コンベアでも原点センサを使わずに希望通りの運転ができますか?
-
コンベア1周に要するモータの回転量[rev]がラウンド機能のパラメータに設定できる値であれば可能です。
ラウンド機能とは、モーター出力軸の回転数が設定した範囲を超えると、現在の位置情報が自動的にプリセットされる機能です。このプリセットした位置を原点とすることにより、センサを設けた場合と同じ使い方ができます。 ラウンドの設定は次の流れで行いますが、ここではラウンド範囲の設定について説明します。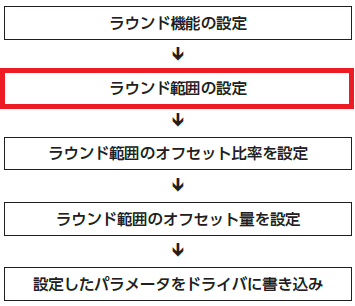
■ラウンド範囲の設定
「初期座標生成・ラウンド設定範囲」パラメータを設定します。パラメータの値は下表から選択します。コンベアが1周するために要するモータの回転量がパラメータの値となり、その値が表にある場合はラウンド機能を使用できます。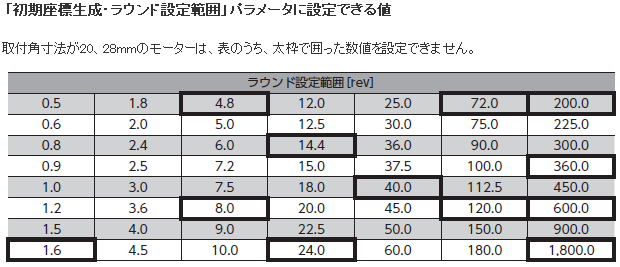
■パラメータ値の確認例
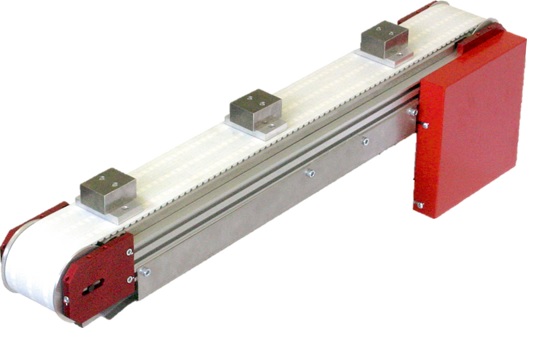
コンベアを例に2パターンご説明します。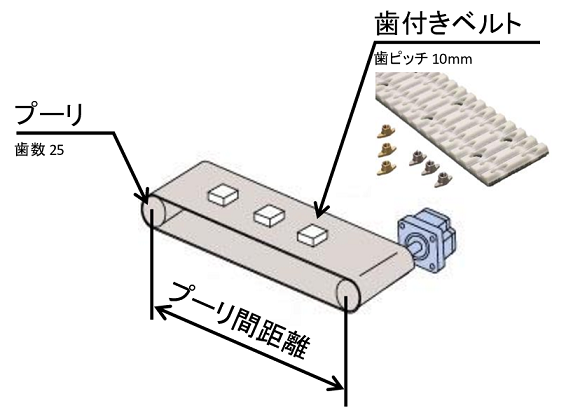
〈例1:プーリ間距離 1000mmのコンベア〉諸元 計算結果 ①プーリ間距離 1000mm
②プーリの仕様 歯数 25
③ベルトの仕様 歯付きベルト.歯ピッチ 10mm
④仮選定のモータ AZM66AC-TS20
モータ分解能 0.36°.ギヤ減速比 1/20諸元①~④よりコンベア1周に要するモータの回転量を算出します。
ベルトの長さ=1000×2+25×10
=2250mm
モータ軸1回転でベルトが進む距離
=25×10÷20
=12.5mm
コンベア1周に要するモータの回転量
=2250÷12.5
=180rev
180revは表にありますのでラウンド機能を使用できます。〈例2:プーリ間距離 1500mmのコンベア〉諸元 計算結果 〈例1〉のプーリ間距離を1500mmに変更.他は同じ ベルトの長さ=1500×2+25×10
=3250mm
モータ軸1回転で進む距離
=25×10÷20
=12.5mm
コンベア1周に要するモータの回転量
=3250÷12.5
=260rev
260revは表にありませんのでラウンド機能を使用できません。このようにベルトやプーリの諸元、モータの分解能などにより設定できる場合と出来ない場合があります。AZシリーズのラウンド機能を使用する場合は、設計段階でご確認いただくことをお勧めします。なお、オリムベクスタではAZシリーズを搭載した『インデックスコンベア』を販売しており、ラウンド機能が使用できるプーリ間距離500/625/1000/1125/1750mmのタイプもご用意しています。設計・調達・組立・検査などの負荷を削減し、購入後すぐにお使いいただけます。あわせてご検討ください。
関連コンテンツ
●NKE製 αステップ AZシリーズ搭載 インデックスコンベア
お客様の質問・問題は解決しましたか?
解決しなかった場合はこちらからお問い合わせください⋙
